|
���S�w�����������w���������в������Ρ������`������� ���ԑ�ͣ�ȃ�(y��u)�c����С�ɵ��w�e�����m��(y��ng)�ںܶ����;�����S�w�����ڽY(ji��)��(g��u)���^��һֱ���C��ȣ��Y(ji��)��(g��u)�o�����ܮa(ch��n)�������������ͬ�r����ͨ�^��Ť������ʹ�w����ƽ�⣬����Ҫ���T�ķ�Ť����������ͣ���ܸ������ã����ڿ��ƣ����ڲ����ߵ�Ҫ�ߵ����c���@���ڏV���đ�(y��ng) ���ƏV������Ҫ�����x�������ú�܊���I(l��ng)���ЏV���đ�(y��ng)��ǰ������ˌ������S�w���� ���о������ش�ĬF(xi��n)�����x�� �S���Ƽ��İl(f��)չ���˂�����Ĺ�(ji��)��ҲԽ��Խ�죬�S֮�˂������㣬��ݵ�Ҫ��Ҳ�S֮�������ߡ��b�����ij��F(xi��n)����һ���̶��ϝM�����˂��@��Ҫ���b�������ɸ߮a(ch��n)�İl(f��)����Robert Adler����ʮ����l(f��)���ġ����t���b����20���o70������_ʼ�l(f��)չ������һ�N�h�̿��Ƽ��g(sh��)����ԭ�������üt�⾀����f������̖�����F(xi��n)�����ƌ�����h���x���ƣ����w���v�������аl(f��)�����l(f��)���t�⾀ָ����̖���н�����������������̖�M��̎������F(xi��n)�����ƌ���ĸ��N���ܵ��h�̿��ơ�
�t���b�ؾ��Ъ����ԡ����������c��Ҋ�������ԡ��o���ϵK����������^�����[ ���Ե����c���S���t���b�ؼ��g(sh��)���_�l(f��)��Ѹ�ٰl(f��)չ���ܶ�ط�����(y��ng)���˼t���b�أ����w ����Ҳ�����⡣�Ćμ������w�������������ͨ�^���o���ƣ��� 10 �������h���x
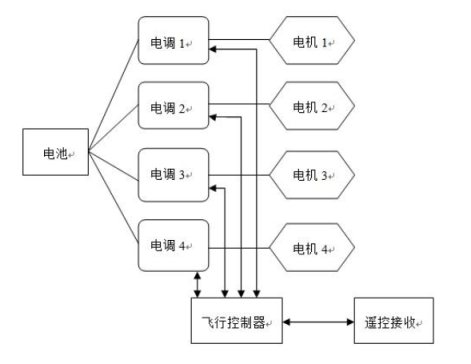
���b �أ��mȻ��׃�����䎧���ı����o���Ǿ�ġ����t���b�ؼ��g(sh��)�ij��죬Ҳʹ���b���������w����׃���O(sh��)Ӌ���Σ��r������� С���������w�����c�����w������ȣ��䃞(y��u)��������Cе�Y(ji��)��(g��u)�^�麆�Σ�����ֻ���׃�Ă��R�_���D(zhu��n)�ټ��Ɍ��F(xi��n)���ƣ��w�ЙC�������`���һ���棬С���������w���������^�ߵIJٿ����ܣ�������С�^(q��)����(n��i)���w���P�����w�С���ꑵ�������С���������w�����о�Ҳ���Ԅӿ����Լ�Ӌ��C�ƌW(xu��)���T���I(l��ng)����ں��о��ṩ��һ��ƽ�_�� ���O(sh��)Ӌ��Ҫͨ�^stm32��Ƭ�C�R�e�b�����l(f��)������̖���Ă�ֱ��С늙C�M���ٶȿ��ƣ���늙C�����Ă��������D(zhu��n)�����F(xi��n)�w�����ļ��١��p�١�������ǰ�������Ƅӵȹ��ܡ���(n��i)���漰���W(xu��)������ֱ��늙C�(q��)�ӡ���Ӌ��C���ƵȌW(xu��)���I(l��ng)�� �O(sh��)Ӌ��Ҫ���F(xi��n)������Ҫ���ܣ� ����stm32��Ƭ�C�����b���������w������ͣ���Ӝp�١�ǰ�M���ˡ����҂�(c��)�w�Լ������D(zhu��n)�� �� ��Ҫ�����O(sh��)Ӌ�x��B�M�ɽY(ji��)��(g��u)���£� ���S�w������Ҫ�M�ɣ� 1���b���� MCU STM32F103C8T6Cortex-M372MHz64K(Flash)20K(SRAM) ���� 0.96 ���{ɫ OLED ͨ�� NRF24L01++PA+3dbi �쾀 2���w���� MCU STM32F411CEU6Cortex-M4100MHz512KB(Flash)128K(SRAM ������ MPU9250�� 3 �S����Ӌ+3 �S���݃x+3 �S����Ӌ��+BMP280���≺�������� ͨ�� NRF51822-QFAA2.4G ���~ 716 ���ı�늙C +48mm ���~ ����늙C�S�� 92mm*92mm 늳� 3.7V/250mAh �늳� ��늕r�g 30min �w�Еr�g�s 9min ���w�O(sh��)Ӌ�Y(ji��)��(g��u)�� �D2 �O(sh��)Ӌ�Y(ji��)��(g��u) 2.1 �b����2.1.1 ͨ���b�������ڰl(f��)���N����ָ�����ͨ���l�Ξ� 2.4G�����S�w�����Ŀ���������Ҫ4��ͨ��������Խ����Ҫ��ͨ����(sh��)Խ�ࡣͨ�������b�������Կ����w�����Ą�����·��(sh��)��һ��ͨ������һ���������������T�ĸߵ� ���ƾ�ʹ�õ�һ��ͨ��������Ŀ�����ʹ�õ�һ��ͨ�������S�Ļ��������д�ֱ���������\�ӣ�����\ǰ���\�ӣ��M�L\��(c��)���\�ӣ�ƫ���\�ӣ������b�������Ҫ����ͨ�������H�҂�߀��Ҫ�A(y��)��һЩ�~��ͨ�������������IJ�������������x����ͨ���b������ 2.1.2 �ձ��֡��������b������������(x��)�T�ɷ֞������ֺ��ձ��փɷN���@���Ǹ���(j��)�b�����u�U�IJ���ȡ���������҂�ʹ�õ��������֡������֣��f���֓u�Uؓ؟(z��)���T��ƫ�������֓u�Uؓ؟(z��)�����͙M�L�����֓u�U�������T���ƣ� ������ƫ�����ƣ����֓u�U���鸩�����ƣ� ���Ҟ�M�L���ơ�����(y��ng)������һ�N�b�؞��ձ��֡� ���֓u�Uؓ؟(z��)������ƫ���� ���֓u�Uؓ؟(z��)���T�͙M�L�� 2.2 �w�п������w�п����������S�w�����ĺ��ģ��Á������Ă�늙C�f(xi��)�{(di��o)�������z�y�w�����߶ȡ��ˑB(t��i)���Ԅ��{(di��o)��(ji��)�w�Є����� 2.3 ���S�C����Ҋ�����S�C����ʮ���ͣ�X �ͣ�H�ͣ�ľ�ģ�PVC�ܣ��X�Ͻ𣬲��w��̼�w�����Á����C�ܡ�DIY�����S���õ�̼�w�S֧�ܣ�С���SҲ����PCB ���C�ܡ� �� ���S�w�����\��ԭ�����S�w��������ԭ����ͨ�^�w�ؿ����Ă�늙C���D(zhu��n)���ӝ{�~�a(ch��n)���������քe����ÿһ��늙C�͝{�~�a(ch��n)����ͬ �������Ķ������w�������ˑB(t��i)��λ�á� ���S�ڿ��п��Ԍ��F(xi��n)�˷N�\�ӣ��քe�鴹ֱ��������ֱ�½�����ǰ�\�ӡ�����\�ӡ������\�ӡ�����\�ӡ� 형rᘸ�׃������rᘸ�׃���� ������+ģʽ��B���S�w�����w��ԭ����X ģʽ��+ģʽ�����B���� 3.1 ��ֱ�\�� ��D 3.1 ��ʾ��늙C 1 ��늙C 3 ��r����D(zhu��n)��ͬ�r��늙C 2 ��늙C 4 형r����D(zhu��n)����ˮ�(d��ng)�w����ƽ���w�Еr�� ����Ч��(y��ng)�Ϳ՚����Ť��Ч��(y��ng)���������� ��D 3.1 ��ʾ��늙C 1 ��늙C 3 ��r����D(zhu��n)��ͬ�r��늙C 2 ��늙C 4 형r����D(zhu��n)����ˮ�(d��ng)�w����ƽ���w�Еr�� ����Ч��(y��ng)�Ϳ՚����Ť��Ч��(y��ng)����������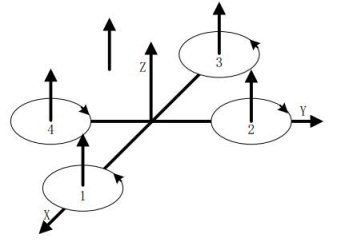
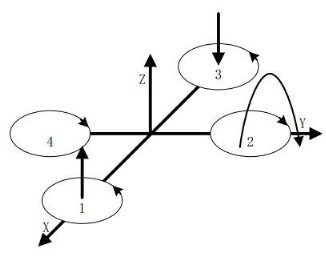
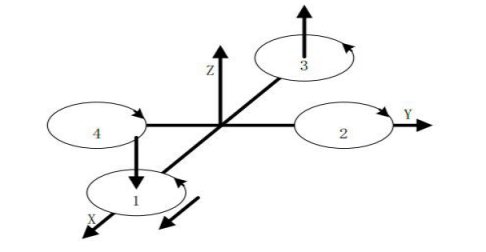
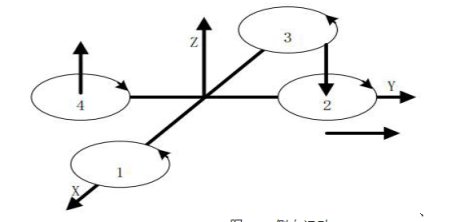
�D 3.1 ��ֱ�\����(d��ng)ͬ�r�����Ă�늙C��ݔ�����ʣ������D(zhu��n)������ʹ�ÿ�����������(d��ng)���������Կ˷����C�������r������ ���w�������x�ش�ֱ��������֮��ͬ�r�pС�Ă�늙C��ݔ�����ʣ��������w�����t��ֱ�½���ֱ��ƽ����أ��� �F(xi��n)���� z �S�Ĵ�ֱ�\�ӡ� ��(d��ng)���_��������r���������a(ch��n)�������������w���������ؕr���w�����㱣�֑�ͣ��B(t��i)�����C�Ă������D(zhu��n)��ͬ�����ӻ�pС�Ǵ�ֱ�\�ӵ��P(gu��n)�I�� 3.2 �����\�ӣ�PITCH���D 3.2 늙C 1 ���D(zhu��n)��������늙C 3 ���D(zhu��n)���½���늙C 2��늙C 4 ���D(zhu��n)�ٱ��ֲ�׃�����˲���������D(zhu��n)�ٵĸ�׃�����������w�������wŤ�ؼ���������׃������ 1 �c���� 3 �D(zhu��n)�ٸ�׃���Ĵ�С��(y��ng)��ȡ��������� 1 ������������ ����3 �������½����a(ch��n)���IJ�ƽ������ʹ�C���@ y �S���D(zhu��n)��������D��ʾ����ͬ������(d��ng)늙C 1 ���D(zhu��n)���½���늙C 3 ���D(zhu��n)���������C�����@ y �S����һ���������D(zhu��n)�����F(xi��n)�w�����ĸ����\�ӡ� �D 3.2 �����\�� 3.3 �L�D(zhu��n)�\�ӣ�ROLL���c�D 3.2 ��ԭ����ͬ���ڈD 3.3 �У���׃늙C 2 ��늙C 4 ���D(zhu��n)�٣�����늙C 1 ��늙C 3 ���D(zhu��n)�ٲ�׃���t��ʹ �C���@ x �S���D(zhu��n)������ͷ������F(xi��n)�w�����ĝL�D(zhu��n)�\�ӡ� �D 3.3 �L�D(zhu��n)�\�� 3.4 ƫ���\�ӣ�YAW�� �������w����ƫ���\�ӿ��Խ��������a(ch��n)���ķ�Ť�팍�F(xi��n)�������D(zhu��n)���^�������ڿ՚��������Õ��γ��c�D(zhu��n)�� �����෴�ķ�Ť�أ����˿˷���Ť��Ӱ푣���ʹ�Ă������еăɂ����D(zhu��n)���ɂ����D(zhu��n)���Ҍ��Ǿ��ϵĸ��������D(zhu��n)�� ������ͬ�� �������w����ƫ���\�ӿ��Խ��������a(ch��n)���ķ�Ť�팍�F(xi��n)�������D(zhu��n)���^�������ڿ՚��������Õ��γ��c�D(zhu��n)�� �����෴�ķ�Ť�أ����˿˷���Ť��Ӱ푣���ʹ�Ă������еăɂ����D(zhu��n)���ɂ����D(zhu��n)���Ҍ��Ǿ��ϵĸ��������D(zhu��n)�� ������ͬ����Ť�صĴ�С�c�����D(zhu��n)�����P(gu��n)����(d��ng)�Ă�늙C�D(zhu��n)����ͬ�r���Ă������a(ch��n)���ķ�Ť���ƽ�⣬�������w������ �l(f��)���D(zhu��n)�ӣ���(d��ng)�Ă�늙C�D(zhu��n)�ٲ���ȫ��ͬ�r����ƽ��ķ�Ť�ؕ������������w�����D(zhu��n)�ӡ� �ڈD 3.4 �У���(d��ng)늙C 1 ��늙C 3 ���D(zhu��n)��������늙C 2 ��늙C 4 ���D(zhu��n)���½��r������ 1 ������ 3 ���C���ķ�Ť �ش������� 2 ������ 4 ���C���ķ�Ť�أ��C�����ڸ��෴Ť�ص��������@ z �S�D(zhu��n)�ӣ����F(xi��n)�w������ƫ���\�ӣ��D(zhu��n) ���c늙C 1��늙C 3 ���D(zhu��n)���෴�����늙C�Ŀ�������׃���w�C�����l(f��)����ֱ�\�ӡ�
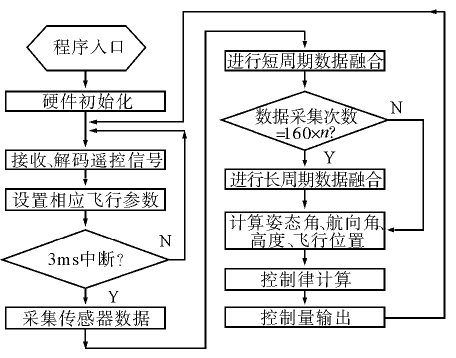
�D 3.4 ƫ���\�� 3.5 ǰ���\��Ҫ�댍�F(xi��n)�w������ˮƽ���(n��i)ǰ�����ҵ��\�ӣ�ǰ���\�� �����ˮƽ���(n��i)���w����ʩ��һ���������ڈD 3.5 �У�����늙C 3 �D(zhu��n)�٣�ʹ������������(y��ng)�pС늙C 1 �D(zhu��n)�٣�ʹ�����pС��ͬ�r���������ɂ�늙C�D(zhu��n)�ٲ�׃����Ť ����ȻҪ����ƽ�⡣ ���D 3.2 ����Փ���w�������Ȱl(f��)��һ���̶ȵăAб���Ķ�ʹ���������a(ch��n)��ˮƽ��������˿��Ԍ��F(xi��n)�w������ ǰ�w�\�ӡ�����w���c��ǰ�w�������෴�� ��(d��ng)Ȼ�ڈD 3.2 �D 3.3 �У��w�����ڮa(ch��n)�����������L�\�ӵ�ͬ�rҲ���a(ch��n)���� x��y �S��ˮƽ�\�ӡ� �D 3.5 ǰ���\�� 3.6 ��(c��)���\���ڈD 3.6 �У����ڽY(ji��)��(g��u)���Q�����Ԃ�(c��)���w�еĹ���ԭ���cǰ���\����ȫһ�ӡ� �D 3.6 ��(c��)���\�� �� �w�п�����Ӳ���O(sh��)Ӌ�w����������Ҫ�܉�ͨ�^�ɼ�̎����MEMS�T�����������S�شł�������(sh��)��(j��)��Ӌ���w�������ˑB(t��i)�Ǻͺ���ǣ�������(j��)�w��ָ����΄�(w��)Ҫ�Y(ji��)������(y��ng)�Ŀ����ɽo���m��(d��ng)?sh��)Ŀ�����̖�������w�����Ĉ�(zh��)�ЙC��(g��u)����׃�w�������ˑB(t��i)��λ�õȡ� ����(j��)ģ�K���O(sh��)Ӌ˼�룬�O(sh��)Ӌ���w�п����������а���������ģ�K����(sh��)��(j��)�ɼ�ģ�K����̖����̎��ģ�K����(zh��)�ЙC��(g��u)�(q��)��ģ�K�Լ���(sh��)��(j��)ͨӍ�ӿڡ��w�п��������xȡSTM32̎������������оƬ��Ӳ��ƽ�_���w�Y(ji��)��(g��u)��D 2 ��ʾ�� �D4 �w�п�����Ӳ���Y(ji��)��(g��u) 4.1 ����ģ�K�������ĺ�����������ģ�K������(y��ng)���ж�·ģ�M��̖�ĸ߾��Ȳɼ�������ݔ��PWM�}�_������̖���������� PPM��̖���@��a����;�����⣬߀��(y��ng)���ж���ͨ���ŵ��������ؓ�d�ŷ��Cݔ��ͨ���Լ���(sh��)��(j��)�ӿڡ� ���]����ͬ�h(hu��n)�����{(di��o)ԇ�ı���ԣ�����ģ�K�O(sh��)Ӌ��2�N�������d������JTAG��ʽ�Լ�ISP��ʽ�����A(y��)���˶���ؓ�d���O(sh��)�ӿ��ԝM�������C��ؓ�d�O(sh��)��Ŀ������� 4.2 ��(sh��)��(j��)�ɼ�ģ�K��������w�������ƿɿ��ԣ���Ҫ�õ��w�����ĸ����͝L�D(zhu��n)�������ˑB(t��i)�������γ��]�h(hu��n)���ơ���������w�з�(w��n)���ԣ����������ʷ������������ᡣ �w�������w���ˑB(t��i)ͨ�^�T�Ԝy����Ԫ���@ȡ������ 3ֻMEMS���݃x�����S���ٶȂ�������ȫ��ň��������Լ���߾����_15cm���o���߶�Ӌ�� �w����λ����Ϣͨ�^��λϵ�y(t��ng)�@ȡ��������ԭ��D���£�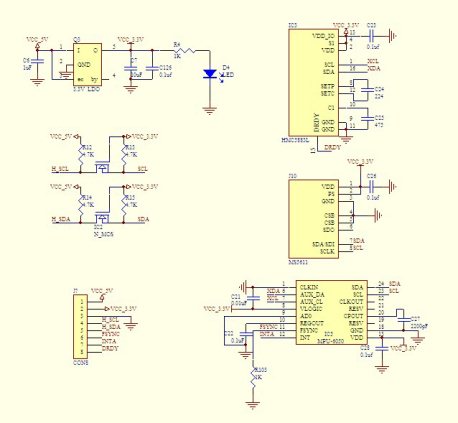 �D4.2 ������ģ�K ���������x��MPU6050�������S���ٶ�Ӌ�����S���ٶȂ����������ٶ�Ӌ�ͽ���������ͨ�^IIC�ӿ��c̎�����M��ͨӍ�� 4.3 ��(zh��)�ЙC��(g��u)�(q��)��ģ�K�����������w����Ҫ���F(xi��n)������ͣ���P(gu��n)�I����Ҫ�w�����ڃAб�r������̵ĕr�g��(n��i)�ص�ƽ��λ�ã��@��Ҫ���(zh��)�ЙC��(g��u)�܉���ٷ���(y��ng)������Ѹ�ٵ������pС�D(zhu��n)�١�ᘌ��������w��������(zh��)�ЙC��(g��u)���x���˟oˢ늙C���oˢ늙C��Ҫ���ԟoˢ��{(di��o)ʹ�á���Ҋ��Ʒ��{(di��o)���õ��� PPM��̖�����ڞ�20ms�� �� �w�п�����ܛ���O(sh��)Ӌ5.1 ܛ���O(sh��)Ӌ��������������ܛ�����ֲ��� c �Z�Ծ��ƣ���Ҫ���Ӳ��ƽ�_��ʼ������(sh��)��(j��)�ɼ�̎�����b����̖��a��늙C���ơ��ˑB(t��i)�ǽ����Լ������ɵČ��F(xi��n)�����������̈D�� 5 ��ʾ�� �D5.1 �������� 5.2 ���Ʒ����������e�֡���( PID)�������Ǯ�(d��ng)�I(y��)��V��ʹ�õ��^�̿�����, ���к��Ρ��ɿ��������ɵ����c[3]��PID�������Y(ji��)��(g��u)����������(sh��)���{(di��o)���m���ڸ��N���ƌ�����Ҫ����ϵ�y(t��ng)�ľ��_����ģ�ͣ������㷨���θ�Ч�����ڬF(xi��n)������(j��)���H�{(di��o)��(ji��)����(sh��)��ȡ���^�õĿ���Ч����ͨ�^PID����(sh��)�������F(xi��n)�ڱ������֡��e���������慢��(sh��)�{(di��o)���Ŀ��Ʋ��ԁ��_�����ϵ�y(t��ng)푑�(y��ng)�Ϳ���Ч����������PID���Ʊ��_ʽ���£� ���У� ��������棬 ��������棬 ��r�g�e�ֳ���(sh��)�� ��r�g�e�ֳ���(sh��)�� ��r�g�ֳ���(sh��)�� ��r�g�ֳ���(sh��)�� ��ݔ��׃���� ��ݔ��׃���� ��ƫ�(sh��)���� ��ƫ�(sh��)���� ��FPGA�У�PID�㷨�Č��F(xi��n)���Ô�(sh��)�ֱƽ���Ӌ�㷽��������FPGA�IJ���̎���ķ�ʽ���ڂ������M����������ʺ͂�ݔ���ܵĻ��A(ch��)�ϣ��S����(sh��)ֵ�ɘ����ʵ����ӣ��䔵(sh��)�ֱƽ��Ĕ�(sh��)ֵԽ�ӽ��挍��(sh��)ֵ�����@�������͵ķ�������e���\�㡢������\��������\�㡣FPGA�ľ��_�r���̖�܉�?q��)��F(xi��n)�S�����������ܵ���ߣ�ʹ�e�֡����\��Y(ji��)������Խ��Խ�ߣ����܉�����ȱ��C�e���g���Ĝ�(zh��n)�_�� ���У� ��ɘ����ڣ� ��ɘ����ڣ� �Dzɘ�����̖�� �Dzɘ�����̖�� ���������w��������ϵ�y(t��ng)�У����Ԍ���e���\������\��ĽY(ji��)�����ƿ����������w�������ˑB(t��i)�ͽ��ٶȡ� ���У�AT��������(y��ng)axis������Pitch��Roll��Yaw�������S�ϵ��ˑB(t��i)��ACC��������(y��ng)axis������Pitch��Roll��Yaw�������S�ϵĽ��ٶȡ�
������Word��ʽ�ęn51�����d��ַ��
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664