�O(sh��)Ӌ(j��)Ҫ�� �Æ�Ƭ�C(j��)����LEDģ�M��ͨ�����|����ͨ�Еr(sh��)�g��80s���ϱ���ͨ�Еr(sh��)�g��60s�����_�r(sh��)�g��3s��
���(xi��ng)Ŀ����͵�LED�@ʾ���Дඨ�r(sh��)�·�����ö��r(sh��)��T0�a(ch��n)��ÿ10msһ�ε��Д࣬ÿ100���Д���1s����(du��)�ɂ�(g��)����քe�@ʾ�t���G���S�������@ʾ����(y��ng)��ʣ���r(sh��)�g��
���O(sh��)Ӌ(j��)����AT89C52��Ƭ�C(j��)�����Æ�Ƭ�C(j��)������̖(h��o)���Ġ�B(t��i)׃������������ָ�]��ͨ�Ļ���ͨ�С��Æ�Ƭ�C(j��)���Ƽt���S���GLED��ģ�Mָʾ��ģ�M�|�������ʮ��·�ڽ�ͨ��̖(h��o)������r���|����ͨ�Еr(sh��)�g��80s���ϱ���ͨ�Еr(sh��)�g��60s�����_�r(sh��)�g��3s�������r(sh��)�g��Ӌ(j��)�r(sh��)ݔ�����������˵��^���� ���O(sh��)Ӌ(j��)��Ҫ�O(sh��)Ӌ(j��)ָ��(bi��o)�� - �t�G����B(t��i)��ʾģ�K��
- T0���r(sh��)��ģ�K����(sh��)�F(xi��n)���N�r(sh��)�g�Ķ��r(sh��)��
- �(q��)��(d��ng)�@ʾģ�K������MAX7219�(q��)��(d��ng)��(sh��)�a�ܵ��@ʾ��Ӌ(j��)�r(sh��)��
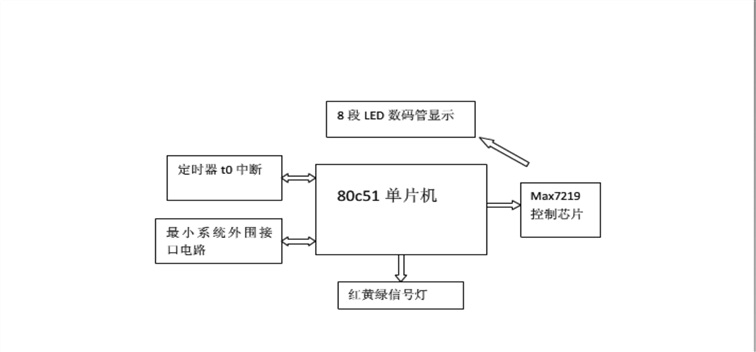
1.3 ϵ�y(t��ng)�Y(ji��)��(g��u)�D
�D1 ϵ�y(t��ng)�Y(ji��)��(g��u)�D ϵ�y(t��ng)�����\(y��n)�к�5V�ķ�(w��n)��Դ�oMAX7219оƬ��LED��̖(h��o)���͆�Ƭ�C(j��)��늣�ͨ�^��Ƭ�C(j��)��(n��i)���Ķ��r(sh��)��T0�a(ch��n)��ÿ10msһ�ε��Д࣬ÿ100���Д���1s����Ӌ(j��)�ĕr(sh��)�g������λ��ͨ�^MAX7219�(q��)��(d��ng)�߶��@ʾ����Ӌ(j��)�r(sh��)ݔ����Ӌ(j��)�M�r(sh��)�g��a(ch��n)���Д࣬�Д�a(ch��n)������̖(h��o)���l(f��)������(y��ng)��׃�������_(d��)���Ԅ�(d��ng)���Ƶ�Ŀ�ġ�
2 ��Փ�����cӋ(j��)�� ���r(sh��)����ֵ��Ӌ(j��)�㣬������ʮ�M(j��n)�Ƶ�ʮ���M(j��n)�Ƶ��D(zhu��n)�������M(j��n)��ͨ�Еr(sh��)�g�ϵĿ��ƕr(sh��)��(y��ng)ע�������еij��R(sh��)�� 2.1 ���r(sh��)����ֵ��Ӌ(j��)��
ͨ�^��Ƭ�C(j��)��(n��i)���Ķ��r(sh��)��T0�a(ch��n)��ÿ10msһ�ε��Д࣬ÿ100���Д���1s���ڱ��O(sh��)Ӌ(j��)�����õľ����12MHZ�����r(sh��)�� T0�鹤����ʽһ�����г�ֵ��X�����r(sh��)�g��m us��
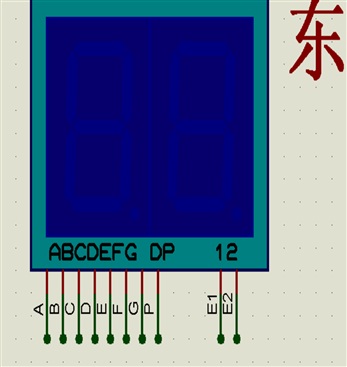
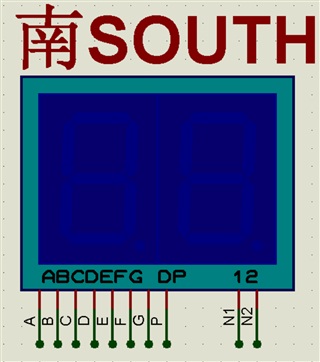
 ��1�� Ӌ(j��)��ɵã����r(sh��)m=10ms=10000us�r(sh��)��X=55536���D(zhu��n)����ʮ���M(j��n)�ƣ�X=D8F0H�������붨�r(sh��)���ij�ֵTH0=0xD8,TL0=0xF0�� 2.2 ͨ�Еr(sh��)�g��Ӌ(j��)�� A����t���r(sh��)�g=B����G���r(sh��)�g+�S�����_�r(sh��)�g ��2�� 3 Ӳ���O(sh��)Ӌ(j��) ����(j��)ϵ�y(t��ng)�Y(ji��)��(g��u)�D��ϵ�y(t��ng)��MAX7219�(q��)��(d��ng)�·���@ʾ�·�������·����(f��)λ�·����Ƭ�C(j��)����·����Ƭ�C(j��)�·�M�ɡ� 3.1�@ʾ�·ͨ�^ԓ�·�� ���˿�������Ŀ�Ҋ��·�ڠ�B(t��i)����������r���Д��Ƿ�ͨ�С�ͬ�r(sh��)����(sh��)�a���@ʾʣ��ͨ�еĕr(sh��)�g����ʾ���ˡ� ��(sh��)�a���@ʾ���棬�|���ϱ�����(g��)����քe�Ã�λ7�Δ�(sh��)�a�ܣ��ϱ������DIG0��DIG1���|�������DIG2��DIG3���M(j��n)��λ�x���ƣ���D2�� �D2 �@ʾ�·1 �t�G����������(g��)��ꖶ��O������ָʾ�����ϱ����|���������(g��)һ�M���քe��(du��)��(y��ng)��(sh��)�a�ܵĵ�Ӌ(j��)�r(sh��)���|������ӆ�Ƭ�C(j��)��P1^0 , P1^1 , P1^2�ڣ��ϱ�����ӆ�Ƭ�C(j��)��P0^0 , P0^1 , P0^2�ڣ���D3�� �D3 �@ʾ�·2
���Ȗ|������ͨ�Еr(sh��)�g��80s���|���G�������ϱ��t�������r(sh��)�g���|���ϱ��S����3s��Ȼ���ϱ�����ͨ�Еr(sh��)�g��60s���ϱ��G�������|���t�������r(sh��)�g����3s���|���ϱ��S����3s�� 3.2MAX7219�(q��)��(d��ng)�· ���Ì��Ô�(sh��)�a���@ʾ����оƬMAX7219��MAX7219������MAXI���a(ch��n)�Ĵ���ݔ��/ݔ����ꎘO�@ʾ�(q��)��(d��ng)����ԓоƬ�����(q��)��(d��ng)8λ7�Δ�(sh��)��LED�@ʾ�������(g��)LED�͗l�ΈD�@ʾ����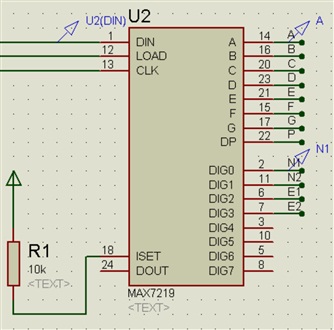  �D4 MAX7219�(q��)��(d��ng)�·
4 ܛ���O(sh��)Ӌ(j��) ��Ӳ���Ļ��A(ch��)�ό�(du��)ܛ���M(j��n)���O(sh��)Ӌ(j��)�����������������r(sh��)�Д��ӳ�����@ʾ�(q��)��(d��ng)�ӳ���M�ɡ���������Ҫؓ(f��)؟(z��)ϵ�y(t��ng)��ʼ���͵ȴ��Д࣬�Լ��t�S�G�����N��B(t��i)�Дࡣ���r(sh��)�Д��ӳ�����Ҫؓ(f��)؟(z��)����(g��)��B(t��i)�Ķ��r(sh��)Ҫ���Լ���B(t��i)�����D(zhu��n)���@ʾ�(q��)��(d��ng)�ӳ���ؓ(f��)؟(z��)��Ӌ(j��)�r(sh��)�r(sh��)�g���@ʾ�� ����(j��)ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)Ҫ��ܛ�����֞飺�ӕr(sh��)ģ�K����B(t��i)�Д�ģ�K���Д����(w��)ģ�K���(q��)��(d��ng)�@ʾģ�K�� 4.1 ���������������MAX7219�ij�ʼ�������r(sh��)���ij�ʼ������B(t��i)���ij�ʼ�����M(j��n)�Р�B(t��i)���Дࡣ
�D 5 �������̈D �M(j��n)���������,�ȳ�ʼ�����_�����r(sh��)��1��MAX7219оƬ�����b���ʼ��B(t��i)�ͳ�ʼֵ��Ȼ��ȴ��Д�푑�(y��ng)������(j��)�յ����Д�푑�(y��ng)�������������Дࡣ�����ϱ��G�������|���t��������Ӌ(j��)�r(sh��)60S�����r(sh��)�Y(ji��)�������Д����D(zhu��n)����һ��(g��)��B(t��i)���ٖ|���ϱ��S��������Ӌ(j��)�r(sh��)3S�����r(sh��)�Y(ji��)�������Д����D(zhu��n)����һ��(g��)��B(t��i)���|���G�������ϱ��t��������Ӌ(j��)�r(sh��)80S�����r(sh��)�Y(ji��)���������Д����D(zhu��n)����һ��(g��)��B(t��i)���|���ϱ��S��������Ӌ(j��)�r(sh��)3S������ѭ�h(hu��n)��(zh��)�С�
��Ҫ���P(gu��n)�I�����a�� - void main()
- {
- T0_init();
- MAX7219_init();
- EA=1;
- NS=60; //��ʼ�ϱ�ͨ��60��
- EW=63;
- R2=0,G1=0; //�ϱ��G�������|���t����
- while (1)
- {
- uint k;
- display();
- switch(i)
- {
- case 1: R2=1,G1=1; //�P(gu��n)�]�ϱ��G�����|���t��
- Y1=0,Y2=0; //�S���W�q
- for(k=0;k<3;k++)
- {
- Y1=~Y1;
- Y2=~Y2;
- delay(10000);
- }
- break;
- case 2: G2=0,R1=0; //�|���G����,�ϱ��t����
- break;
- case 3: G2=1,R1=1;
- Y1=0,Y2=0; //�S���W�q
- for(k=0;k<3;k++) //ѭ�h(hu��n)�����M(j��n)���ӕr(sh��)�W�q
- {
- Y1=~Y1;
- Y2=~Y2;
- delay(10000);
- }
- break;
- case 4: R2=0,G1=0; //�|���t�������ϱ��G����
- break;
- }
- }
- }
�˶γ����nj�(du��)��B(t��i)���Д࣬����switch()....case�Z�䌦(du��)��B(t��i)�M(j��n)���Дࡣ 4.2 ���r(sh��)�Д��ӳ������r(sh��)���ӳ������M(j��n)�Еr(sh��)�g���O(sh��)��������(sh��)�F(xi��n)��B(t��i)���Ԅ�(d��ng)���D(zhu��n)�����D(zhu��n)�^��a(ch��n)�����Д������������M(j��n)���Дಢݔ����
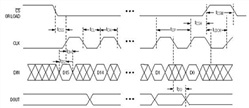
�D 6 ���r(sh��)�Д��ӳ������̈D �O(sh��)��ͨ�Еr(sh��)�g�������ö��r(sh��)���M(j��n)�е�Ӌ(j��)�r(sh��)�����Р�B(t��i)һ60S�����Р�B(t��i)��3S�����Р�B(t��i)��80S�����Р�B(t��i)��3S�� �P(gu��n)�I���a��B�� void T0_(void)interrupt 1 { temp++; TH0=0XD8; TL0=0XF0; if(temp==100) { temp=0; NS--; EW--; if((NS==0)&&(EW==3)) { NS=3; EW=3; i=1; } if((NS==0)&&(EW==0)&&(i==1)) { NS=83; EW=80; i=2; } if((NS==3)&&(EW==0)) { NS=3; EW=3; i=3; } if((NS==0)&&(EW==0)&&(i==3)) { NS=60; EW=63; i=4; } } display(); } ����if�Z�䌦(du��)Ӌ(j��)�r(sh��)�Ƿ��ꮅ�M(j��n)���Д࣬��Ӌ(j��)�r(sh��)�ꮅ����(zh��)��if�еă�(n��i)�ݡ� 4.2 MAX7219�(q��)��(d��ng)���� MAX7219���ô��Ќ�ַ��ʽ���ڂ��͵Ĵ��Д�(sh��)��(j��)�а�����(n��i)��RAM�ĵ�ַ������DIN�_�ϵĴ��Д�(sh��)��(j��)�������LOAD��̖(h��o)����ƽ��ǰ���£���ÿ��(g��)�ֹ�(ji��)��һ��(g��)��(sh��)��(j��)������CLK��̖(h��o)����������16λ����λ�Ĵ�����Ȼ����LOAD��̖(h��o)���������i���M(j��n)��(sh��)�ֻ���ƼĴ����С�LOAD��̖(h��o)����ڵ�16��(g��)CLK��̖(h��o)�����ص�ͬ�r(sh��)��������һ��(g��)CLK��̖(h��o)������֮ǰ���ߣ���t����(sh��)��(j��)��(hu��)�Gʧ��DIN�_�ϵĴ��Д�(sh��)��(j��)��16.5��(g��)CLK��̖(h��o)����F(xi��n)��DOUT�_�ϣ��Ա㼉(j��)(li��n)��(y��ng)�Õr(sh��)������һ��(g��)MAX7219�ϡ� �D 7 ��(sh��)��(j��)���Ђ��͕r(sh��)��D
�P(gu��n)�I���a��B�� - void MAX_write(uchar ch) //��8λһ��(g��)�ֹ�(ji��)�M(j��n)�Ќ�ֵ
- {
- uchar j,ads;
- for(j=0;j<8;j++) //8λ
- {
- ads=ch&0x80; //ȡ���λ
- CLK = 0; //�r(sh��)犾��õ�
- if(ads) DIN = 1;
- else DIN = 0;
- ch=ch<<1; //����һλ
- CLK=1; //�����أ�DIN�Ĕ�(sh��)��(j��)���뵽7219
- }
- }
- void MAX7219(uchar addr, uchar num) //����ַ������(sh��)��(j��)
- {
- LOAD = 0;
- _nop_();
- MAX_write(addr);
- _nop_();
- MAX_write(num);
- _nop_();
- LOAD = 1; //�i��
- }
ϵ�y(t��ng)�y(c��)ԇ
5.1 ��Ӌ(j��)�r(sh��)��B(t��i)�y(c��)ԇ��Proteus����ܛ���M(j��n)��ϵ�y(t��ng)�y(c��)ԇ��
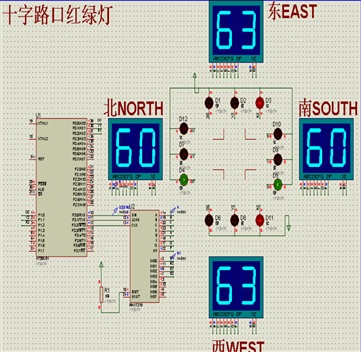
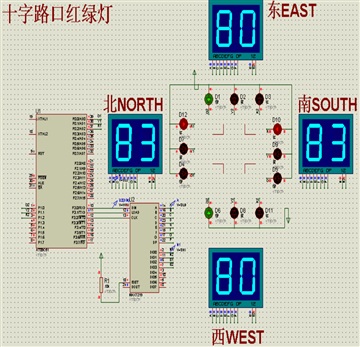
�D8 60S��80SӋ(j��)�r(sh��) �Y(ji��)Փ��?ji��n)�Ƭ�C(j��)��(n��i)�����r(sh��)���܉��M(j��n)�ж��r(sh��)�� 5.2 �t�G����B(t��i)�y(c��)ԇ��Proteus����ܛ���M(j��n)��ϵ�y(t��ng)�y(c��)ԇ�� ��1 �t�G����B(t��i)�y(c��)ԇ
�Y(ji��)Փ��ÿ��(g��)��B(t��i)�܉����������D(zhu��n)�� 5.3 ϵ�y(t��ng)(li��n)�C(j��)�y(c��)ԇ1����Ӳ���D�Ӿ������˴_���|���ϱ��t�S�G���܉�?q��)��?y��ng)�@ʾ����(sh��)�(y��n)�r(sh��)����(du��)P1�ڵĽӾ������{(di��o)��������P1.0��G2�G��,P1.1��Y2�S��,P1.2��R2�t��,P0.1��G1�G��,P0.2��Y1�S��,P0.3��R1�t���� 2���ĵ�һ��(g��)��B(t��i)�_ʼ�B�m(x��)�\(y��n)�У��^������(g��)LED���Ƿ��c��ͨ�@ʾ��r��(du��)��(y��ng)�������ƫ��t�β��\(y��n)�л���c(di��n)�\(y��n)�У��M(j��n)���{(di��o)ԇ��ֱ���M���O(sh��)Ӌ(j��)Ҫ�� 3���{(di��o)ԇ������@ʾ�ĵ�һ��(g��)��B(t��i)�_ʼ�B�m(x��)�\(y��n)�У��^�씵(sh��)�a���@ʾ���Ƿ�������������������t�\(y��n)�Æβ��\(y��n)�л���c(di��n)�\(y��n)���M(j��n)�з������{(di��o)ԇ��ֱ���M��Ҫ�� 4�����w�\(y��n)�У��^����@ʾ�͕r(sh��)�g�@ʾ�Ƿ���Ҫ����������ϣ��t���{(di��o)ԇ��ֱ���M��Ҫ��
6 ���Y(ji��)�Լ�չ�� ���O(sh��)Ӌ(j��)��(sh��)�F(xi��n)�O(sh��)Ӌ(j��)Ҫ�� ���O(sh��)Ӌ(j��)�ڌ�(sh��)�F(xi��n)����(y��ng)���ܵĕr(sh��)����Ҫ�ǿ��]���F(xi��n)�еėl�������ó���ȸߵ�STC89C52����CPU�Ľ�Q������ͬ�r(sh��)��LED�����pλ��(sh��)�a�������@ʾģ�K��ܛ���tʹ������ֲ�Ժõ�C�Z�ԡ��Ĺ��������ρ������ѽ�(j��ng)�܉�M�㺆(ji��n)�εđ�(y��ng)����Ҫ�� ���O(sh��)Ӌ(j��)�^���У����_ʼ�O(sh��)Ӌ(j��)ԓϵ�y(t��ng)�Ĺ��ܣ���������Փ�C���ٵ������{(di��o)ԇ��ÿһ�����@������ô����Ҫ�����@��(g��)�^���ЌW(xu��)��(x��)���˱��@���O(sh��)Ӌ(j��)���������֪�R(sh��)������֮�⣬���@���O(sh��)Ӌ(j��)��Ҳ�춨���Ҍ�(du��)һ��(g��)���I(y��)�a(ch��n)Ʒ�O(sh��)Ӌ(j��)��˼�S���ի@�H�S�� չ�������ڕr(sh��)�g���ޣ����O(sh��)Ӌ(j��)߀��Ҫ���ܶ�ĸ��M(j��n)��������a(ch��n)Ʒ�M(j��n)���Ј�(ch��ng)���磺�ڌ�(du��)��Ƭ�C(j��)��늷����п��ԸĞ����(ji��n)�ε���ݽ����·���ڠ�B(t��i)�Ķ����Է���߀�܆�һ����������һЩ���ӷ��ό�(sh��)�H��r�Ġ�B(t��i)���珝���r(sh��)�Ġ�B(t��i)�����r(sh��)�Ġ�B(t��i)����(y��ng)����B(t��i)����PCBԪ��������߀���Ը��ƌW(xu��)ʹ���Č������ĸ�����Ԫ�����x����Ć��}��ʹ���܉�ͨ�^һЩ��(bi��o)��(zh��n)��
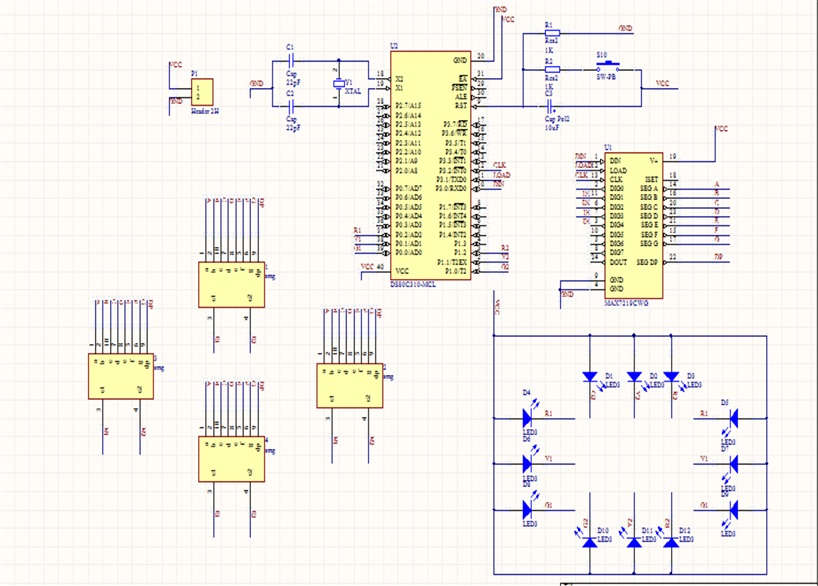
�D9 ϵ�y(t��ng)ԭ��D
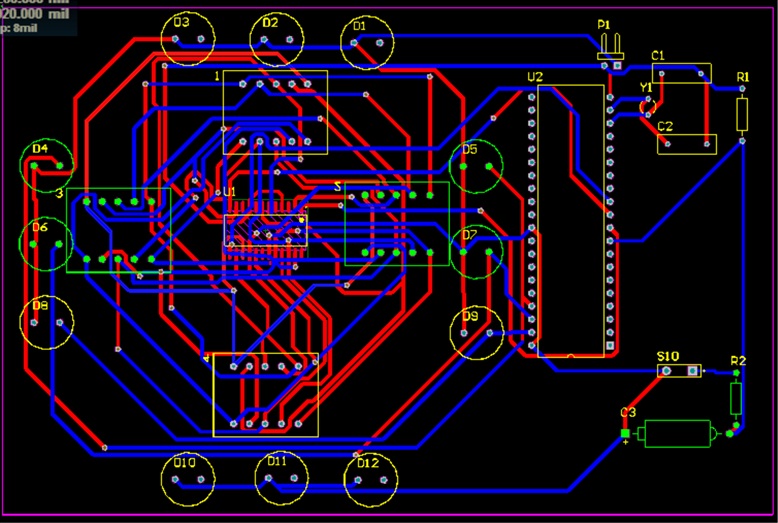
��ϵ�y(t��ng)��PCB��D���p�ز����� �D10 ϵ�y(t��ng)PCB�D

51hei.png (3.87 KB, ���d��(sh��): 60)
���d����
2020-4-28 15:29 �ς�
ȫ���Y��51hei���d��ַ��
 ͨ�Ž�ͨ��.7z
(981.18 KB, ���d��(sh��): 121)
ͨ�Ž�ͨ��.7z
(981.18 KB, ���d��(sh��): 121)
2020-4-28 15:35 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��