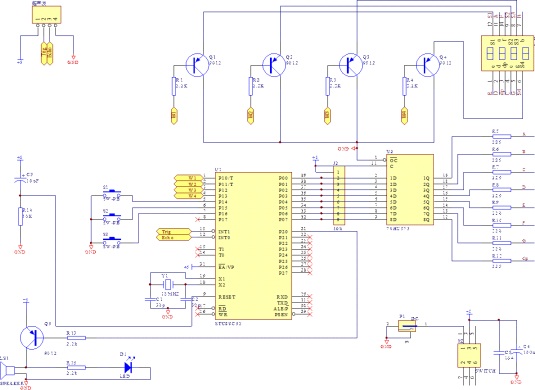
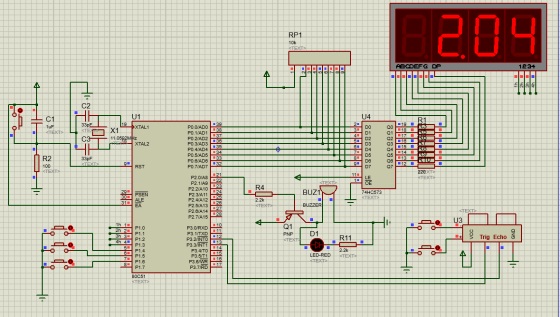
仿真原理圖如下(proteus仿真工程文件可到本帖附件中下載)

下載.png (116.21 KB, 下載次數(shù): 67)
下載附件
2020-6-5 11:29 上傳
下載.png (116.21 KB, 下載次數(shù): 53)
下載附件
2020-6-5 11:32 上傳
進入新世紀以來,中國的綜合實力顯著提高,人們的生活水平也越來越高,汽車走進千家萬戶。人們在日常生活中對汽車的使用率也越來越高,與此同時帶來的是道路的擁堵和車位的緊張。街道、停車場的車位數(shù)量減少的同時,停車位面積也會繼續(xù)縮小,停車難度也會同步提高。鑒于日常生活中倒車和停車的人越來越多,人們對倒車系統(tǒng)的安全性也有了更大的需求。本文以此為背景,提出了一種基于超聲波測距儀的汽車倒車系統(tǒng)。該系統(tǒng)在滿足便捷性和適用性的基礎(chǔ)上,融入了距離顯示和報警功能。
本文先對超聲波的研究現(xiàn)狀和發(fā)展趨勢做出研究分析,結(jié)合多名學(xué)者在汽車倒車和停車方面的研究,提出了一種汽車倒車測距儀的設(shè)計方案。該超聲波測距儀可以顯示當(dāng)前距離,且具有報警系統(tǒng),當(dāng)最小距離包含在危險值中時,系統(tǒng)將有報警提示。
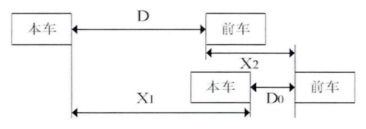
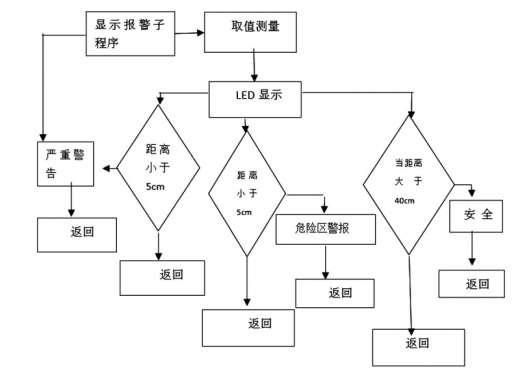
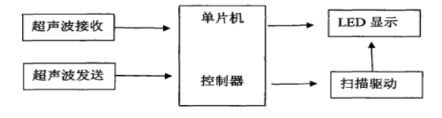
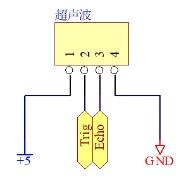
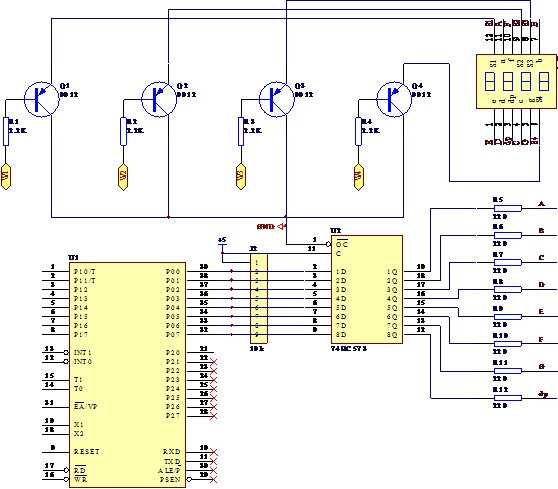
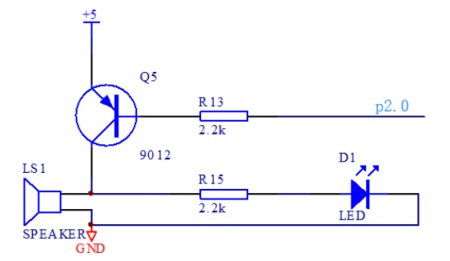
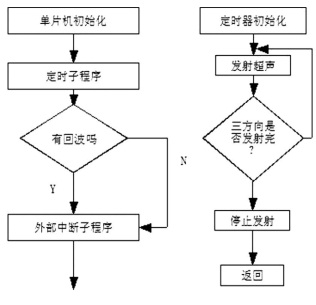
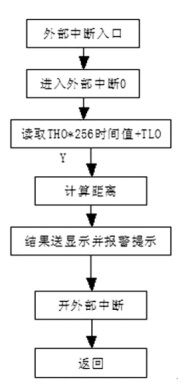
本文以汽車倒車測距儀為研究對象,設(shè)計了一個STC89C51單片機為控制器的系統(tǒng),該平臺采用超聲波測距技術(shù)。本文主要研究內(nèi)容為:了解國內(nèi)外倒車儀系統(tǒng)的現(xiàn)狀和發(fā)展前景;自主設(shè)計和制造汽車倒車測距儀;其中超聲波元件檢測距離信號后將數(shù)據(jù)發(fā)送到單片機處理,然后由單片機判斷是否報警,具有LCD屏顯示。系統(tǒng)的總體設(shè)計框圖如圖1-1所示: 圖1-1總體設(shè)計框圖 本文內(nèi)容安排如下: 本文正文部分一共分為五章,詳細地介紹了汽車倒車儀的發(fā)展狀況,完整地介紹了汽車倒車測距儀設(shè)計制作和實驗調(diào)試的過程,每章內(nèi)容安排如下: (1)緒論:主要介紹了汽車倒車測距儀的發(fā)展背景,內(nèi)容和意義,以及國內(nèi)倒車儀產(chǎn)品和超聲波測距技術(shù)的研究現(xiàn)狀和發(fā)展趨勢,以及本文要完成的工作; (2)硬件設(shè)計:本章首先對系統(tǒng)的硬件進行了總體設(shè)計,介紹系統(tǒng)所用的電子元件的比較和選擇,以及硬件電路的設(shè)計,包括主控電路,超聲波模塊監(jiān)測電路,其他電路(包括電源電路,顯示電路)的設(shè)計; (3)軟件設(shè)計:介紹了程序設(shè)計要求,設(shè)計思路以及流程,對程序進行調(diào)試和仿真; (4)系統(tǒng)調(diào)試:完成系統(tǒng)軟硬件調(diào)試工作,進行物理功能的實驗,調(diào)試和分析; (5)總結(jié)與展望:總結(jié)本文的主要工作內(nèi)容,并分析、總結(jié)不足之處,結(jié)合溫度控制系統(tǒng)目前的發(fā)展狀況作出展望。 2 系統(tǒng)方案設(shè)計2.1汽車制動距離要設(shè)計汽車倒車儀,就需要根據(jù)汽車運動學(xué)理論來測量汽車的制動距離。汽車減速的時候與時間的關(guān)系如圖2-1所示: 圖2-1 制動減速度與時間的關(guān)系示意圖 其中車速為v,減速度的最大值為amax,汽車的制動減速過程中可以分為三個階段。 (1)th-ta時間段。此時間段內(nèi),汽車的移動距離為s1。  (2.1) (2.1)(2)ts時間段,此時間段內(nèi),汽車的移動距離為s2,,速度可以按照公式(2.2)進行計算。  (2.2) (2.2)移動的距離s2可以根據(jù)公式(2.3)進行計算。  (2.3) (2.3)(3)tv時間段內(nèi)汽車移動的距離s3,此時間段的初速度為v,因為時間段結(jié)束時,汽車已經(jīng)停止,所以末速度為0。可以按照(2.4)進行計算s3。  (2.4) (2.4)把上述計算得出的s1、s2和s3相加,就可以得出汽車制動時候的全部距離。  (2.5) (2.5)由于(2.5)的最后一項的數(shù)值很小,可以不予計算,所以可以對公式進行簡化,得出:  (2.6) (2.6)圖2-2為當(dāng)前車輛與前車的位置示意圖,其中D為實際的行駛距離,D0為安全間距。劇烈小于此D0時,測距儀會通過超聲波檢測出來并進行報警。 圖2-2本車與前車相對位置示意圖 2.2 超聲波技術(shù)人的耳朵能識別一定范圍內(nèi)的聲音,且所聽到的頻率必須在20hz到20khz之間,在這個頻率范圍內(nèi)的機械波稱為聲波。聲波可以根據(jù)頻率的不同分為三種類型,即次聲波、聲波、超聲波和超超聲波。如圖2-2所示。超聲波頻率應(yīng)高20KHz。 圖2-2聲波頻率界限圖 超聲波在物質(zhì)中的傳播速度的主要制約因素為介質(zhì)的密度。由于超聲波在空氣中傳輸?shù)臅r候只存在縱波,傳播速度公式如(2.7):  (2.7) (2.7)μ--超聲波在空氣中的傳播速度; γ--氣體熱容比; P--壓強; ρ--為介質(zhì)密度。 在理想氣體狀態(tài)下,有:  (2.8) (2.8)把(2.8)帶入(2.7)中,可以得到超聲波在理想氣體中的傳播速度。  (2.9) (2.9)上述式中: μ--超聲波的傳播速度; γ---氣體熱容比; R--氣體普適常量; T--絕對溫度; M--摩爾質(zhì)量。 從(2.9)可以看出,超聲波的超波速度會受到溫度、濕度等環(huán)境因素的影響,考慮到溫度對超聲波傳播速度的影響比較大,我們需要把溫度的速度的影響考慮在內(nèi)。 當(dāng)空氣溫度為0℃的時候,超聲波的傳播速度μ0=331.45m/s,當(dāng)空氣溫度為其它數(shù)值時,有如下公式(2.10)。 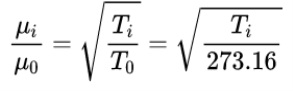 (2.10) (2.10)可以根據(jù)(2.11)來對超聲波在空氣中的傳播速度進行計算。  (2.11) (2.11)其中t是空氣的溫度。在實際計算中,如果在一段時間內(nèi)溫度變化不是很明顯,在精度要求較低的情況下,超聲波的傳播速度可以認為是固定的。如果對精度要求較高,則需要對該值進行修正,并采用溫度補償。一般有兩種補償方法。可以使用溫度傳感器根據(jù)一定的邏輯公式進行校正,也可以查詢相應(yīng)的溫度補償表。超聲波速度與溫度的關(guān)系如表2-1所示。 表2-1超聲波速度與溫度關(guān)系表 2.3測距方案設(shè)計圖2-3是系統(tǒng)信息處理的示意圖。單片機是系統(tǒng)的核心,本系統(tǒng)采用的是單片機STC89C51對系統(tǒng)進行控制。STC89C51通過發(fā)射端發(fā)射超聲波信號,通過接收器接收到的反射信號。單片機將收集到的信號進行分析和處理,然后顯示在顯示屏上。 圖2-3信息處理示意圖 超聲波距離測量可以使用超聲波發(fā)射設(shè)備和接收器之間的時間差來計算距離。本系統(tǒng)選擇的HC-SRO4超聲遙測模塊包括超聲控制電路,發(fā)射器和接收器。 在2厘米至500厘米的范圍內(nèi),它可以顯示出良好的非接觸距離檢測效率,并且精度值最高為0.3厘米。 在測距過程中,STC89C51開始發(fā)送組脈沖序列,從0開始計數(shù)。超聲波通過超聲波發(fā)射端發(fā)射。超聲波在空氣中傳播,當(dāng)遇到前方車輛或障礙物時,超聲波反射回接收端。接收端接收到返回的信號后,再次發(fā)送到STC89C51進行處理,此時停止計數(shù),可以求得往返時間t。如果脈沖周期為T,則車輛與前車或車輛與障礙物之間的距離可按式(2.12)計算。  (2.12) (2.12)式(2.12)中N為計數(shù)脈沖數(shù)。因為超聲波速度和頻率也已知,所以測量的距離與N成正比,只要讀取N的值,即可求得距離。 3 硬件設(shè)計3.1 系統(tǒng)硬件總體結(jié)構(gòu)基于單片機超聲波測距儀汽車倒車系統(tǒng)中,超聲波的處理通過單片機實現(xiàn)。硬件部分可根據(jù)功能分為以下幾部分:MCU主控電路,超聲波電路,LED顯示電路和其他電路。整體硬件框圖如圖2-1所示。從該圖可以清晰的看出本系統(tǒng)的結(jié)構(gòu)和工作流程。 圖3-1 體統(tǒng)結(jié)構(gòu)框圖 系統(tǒng)原理圖如圖3-2所示: 圖3-2 系統(tǒng)原理圖 超聲波獲得的信息傳遞給單片機后,可以通過程序計算出障礙物和汽車之間的距離。然后,顯示在顯示屏上,當(dāng)觸發(fā)報警闕值時實現(xiàn)報警功能,幫助司機獲取有價值的信息,為司機做出正確的響應(yīng)提供支持。本系統(tǒng)的設(shè)計中,如果汽車與障礙物過近,系統(tǒng)就會通過蜂鳴器發(fā)聲、數(shù)據(jù)顯示屏亮度閃動等方式做出警報反應(yīng),提醒駕駛員。 3.2 主控模塊器件選型及設(shè)計3.2.1 單片機的選用目前,市場上有多種MCU,它們的價格和功能均相差較大,因此用戶的選擇范圍也很廣。在實際應(yīng)用中,用戶有必要根據(jù)實際需求來選擇合適的MCU,主要考慮的有價格、功能、兼容等方面。 本文選用的是 STC89C51單片機,該單片機屬于C51系列,它可以通過串口直接下載。此外,該設(shè)備具有以下標準功能:看門狗,7矢量4級中斷結(jié)構(gòu)(與傳統(tǒng)的51個5向量2級中斷結(jié)構(gòu)兼容),MAX810復(fù)位電路,4個外部中斷,全雙工串口。 STC89C51的DIP封裝如圖3-3所示。 圖3-3 DIP封裝的STC89C51RC引腳圖 3.2.2 主控模塊設(shè)計主控模塊電路由STC89C51、時鐘電路、復(fù)位電路組成,它們構(gòu)成了MCU的最小系統(tǒng)。 MCU的復(fù)位由外部復(fù)位電路和MCU中的復(fù)位引腳RST實現(xiàn)。保持兩個機器周期的高電平將完全復(fù)位MCU。本系統(tǒng)既使用了上電復(fù)位,同時,也運用了手動復(fù)位的復(fù)位鍵。 系統(tǒng)時鐘電路采用內(nèi)部設(shè)計。STC89C51內(nèi)部有實現(xiàn)振蕩器功能的放大器,用作具有片外晶體諧振器的反饋部件,以形成自激振蕩器。電容和頻率為12MHz的外部晶振并聯(lián),連接在XTAL1和XTAL2。 復(fù)位電路和時鐘電路如圖3-4所示。  圖3-4 復(fù)位電路和時鐘電路 圖3-4 復(fù)位電路和時鐘電路 3.3 超聲波模塊器件選型及設(shè)計3.3.1 超聲波傳感器的選用本系統(tǒng)選用超聲波測距模塊HC-SR04來進行距離的測量,該模塊工作電壓為5V,具有超小靜態(tài)工作電流2mA,探測精度可達0.3cm。HC-SRO4超聲波測距模塊提供了2cm-400cm的非接觸式距離。其工作時序圖如圖3-5所示。 圖3-5 HC-SRO4超聲波模塊工作時序圖 HC-SR04需要提供一個10uS以上的脈沖觸發(fā)信號來激活模塊進入工作狀態(tài),進入工作狀態(tài)后,模塊內(nèi)部發(fā)出8個40kHz周期電平并檢測回波的到來。當(dāng)檢測到有回波信號時輸出回響信號。回響信號脈沖寬度與所測距離成線性相關(guān)。為了防止發(fā)射信號對回響信號的干擾,觸發(fā)信號周期為60ms以上。HC-SR04實物圖和原理圖分別如圖3-6、3-7所示: 圖3-6 HC-SR04實物圖 圖3-7 HC-SR04原理圖 3.4 其他電路設(shè)計3.4.1顯示電路在本設(shè)計中,顯示電路的構(gòu)成部分為四位LED數(shù)碼顯示管,如圖3-3所示,在四位共陽極LED數(shù)碼管中,LED數(shù)碼管數(shù)量總計4個,并且每個數(shù)碼管的a段都會相連,引腳(11腳)總計1個,采用相同連接方式的還有b段、c段、d段、e段、f段、g段和dp段等,每個LED都具有相對獨立的公共端。LED顯示電路原理圖如圖3-8所示: 圖3-8 LED顯示電路原理圖 3.4.2 蜂鳴器電路蜂鳴器是一塊壓電晶片,在其兩端加上3~-5V的直流電壓,就能產(chǎn)生3KHz的蜂鳴聲。通過單片機軟件產(chǎn)生3KHz的信號從P2.0口送到三極管的基極,控制著電壓加到蜂鳴器上,驅(qū)動蜂鳴器發(fā)出聲音。在本系統(tǒng)中,當(dāng)超聲波模塊測得距離小于5cm時,蜂鳴器將會報警,其電路原理圖如圖3-9所示: 圖3-9 蜂鳴器電路原理圖 3.5 硬件抗干擾整個電路原理圖如圖2-14所示,繪制完原理圖后就完成了系統(tǒng)的硬件設(shè)計部分。但僅是設(shè)計電路原理圖然后制作硬件設(shè)施是不夠的,實際生產(chǎn)中會產(chǎn)生各種各樣的干擾,這些干擾會在生產(chǎn)和實驗中產(chǎn)生較多負面影響,因此需要采用抗干擾措施。抗干擾措施可以根據(jù)應(yīng)用對象,在大體上可以分為硬件抗干擾和軟件抗干擾,它們的目標都是減少干擾在有用信號中的比例。硬件抗干擾主要是通過隔離和接地的方法來實現(xiàn)。 (1)隔離:主要用于過程通道的隔離。在電子設(shè)備和系統(tǒng)中,干擾信號常常會疊加在各種不平衡輸入和輸出信號上,或通過系統(tǒng)的供電線路竄入系統(tǒng),對付這些干擾信號的辦法通常是采用隔離技術(shù),即將噪聲源與信號線相互隔離的技術(shù)。在測量系統(tǒng)抗干擾的隔離措施中,光電耦合器是最常用的隔離器件。; (2)接地:接地是硬件電路中的重要環(huán)節(jié),正確的接地可以使得系統(tǒng)不會相互干擾。接地時應(yīng)注意數(shù)字地和模擬地要分開接,使數(shù)字信號和模擬信號之間不能相互干擾。此外,還應(yīng)設(shè)計適當(dāng)寬度的布線模式,從而保護硬件電路各個模塊之間盡量少受干擾影響。 4 軟件設(shè)計4.1 軟件設(shè)計的要求及思想4.1.1軟件編寫的要求在MCU系統(tǒng)中,硬件的設(shè)計和軟件的編寫時相輔相成的,它們二者缺一不可。軟件編寫的重要程度不亞于硬件的設(shè)計,在某些方面,軟件編寫難度還要高于硬件系統(tǒng)的設(shè)計。控制系統(tǒng)需要正確且合理的軟件程序來驅(qū)動,在編寫程序時應(yīng)該注意以下幾點: (1)簡易性:程序結(jié)構(gòu)盡量簡單,邏輯清晰,要容易理解和修改。在軟件編寫不是從頭編到尾,而是通過功能分塊化的方式,分別編寫多個功能模塊的程序,然后通過把他們調(diào)用到主程序中來實現(xiàn)總體的程序要求; (2)可靠性:該指標在軟件程序的編譯過程中占據(jù)著最重要的地位。系統(tǒng)運行的過程中會不可避免的遇到各種突發(fā)情況以及干擾,此時應(yīng)該保證程序能夠及時的處理這些問題,讓系統(tǒng)回到正常狀態(tài); (3)準確性:對于控制系統(tǒng)來說,不管是數(shù)據(jù)采集還是控制輸出都需要系統(tǒng)有著較高的準確性來支撐,否則即便整體程序沒有錯誤,但是由于精度不高,不也不能完成指定的任務(wù)。因此,在設(shè)計硬件和編寫程序時,都應(yīng)考慮到準確性和精確度方面的問題; (4)實時性:實時性是控制系統(tǒng)的常見要求,這要求系統(tǒng)不能存在較大的延時,要能夠迅速做出反應(yīng)。 綜上,系統(tǒng)的軟件設(shè)計并不簡單,應(yīng)考慮多方面的因素,這就產(chǎn)生了相應(yīng)的軟件設(shè)計思想,應(yīng)該合理的運用這些編程思想以更好地實現(xiàn)用戶所需要的功能和要求。 4.1.2 軟件設(shè)計思想在面向過程的程序設(shè)計思想中,可以把把軟件系統(tǒng)的功能理解為輸入,處理和輸出,這要求程序有準確的因果關(guān)系。另外還有面向?qū)ο蟮某绦蛟O(shè)計思想,即把復(fù)雜的程序工程零件化的思想,按照功能來把程序細分為一些小程序,然后在主程序匯總調(diào)用,形成死循環(huán)。這部分視為軟件的后臺,也可以叫做任務(wù)級。同時在面對一些特點情況時,需要程序跳出當(dāng)前的操作,轉(zhuǎn)而處理一些特定情況,這就是前臺,也可以稱為中斷級。本系統(tǒng)軟件正是基于這種軟件思想編制的。 4.2 系統(tǒng)軟件設(shè)計在面向過程的程序設(shè)計思想中,可以把把軟件系統(tǒng)的功能理解為輸入,處理和輸出,這要求程序有準確的因果關(guān)系。另外還有面向?qū)ο蟮某绦蛟O(shè)計思想,即把復(fù)雜的程序工程零件化的思想,按照功能來把程序細分為一些小程序,然后在主程序匯總調(diào)用,形成死循環(huán)。這部分視為軟件的后臺,也可以叫做任務(wù)級。同時在面對一些特點情況時,需要程序跳出當(dāng)前的操作,轉(zhuǎn)而處理一些特定情況,這就是前臺,也可以稱為中斷級。本系統(tǒng)軟件正是基于這種軟件思想編制的。系統(tǒng)的主程序設(shè)計流程圖如圖4-1所示,其中子程序流程圖如圖4-2所示。 圖4-1主程序設(shè)計流程圖 圖4-2子程序流程圖 4.3 軟件抗干擾措施4.3.1 按鍵的軟件消抖措施按鈕是一個機械開關(guān),當(dāng)按鍵被釋放時,開關(guān)打開,按鍵按住的時候,開關(guān)關(guān)閉。由按鈕的機械特性,當(dāng)按下的時候會產(chǎn)生機械抖動。抖動的時間一般約為10ms——20ms; 目前,針對機械抖動的消除一般有兩種方法:一種是使用波形電路來濾除抖動,這屬于硬件消抖措施;另一種是軟件延遲方法,它使用軟件延遲來避免按下和提升按鈕時的抖動周期,從而避免檢測干擾信號。 4.3.2 數(shù)字濾波數(shù)字濾波是MCU系統(tǒng)設(shè)計中最常用的軟件抗干擾措施,此方法的優(yōu)勢在于:它無需添加額外的硬件,節(jié)約了成本,并且應(yīng)用靈活方便。但是此方法并不是完美的,它會以CPU的開銷為代價,占用一定的處理器的時間。如上文所述,本系統(tǒng)采用的是去極值平均濾波法。 4.4 本章小結(jié)本章主要是介紹了溫度控制系統(tǒng)的軟件程序方面的設(shè)計,分析了系統(tǒng)程序設(shè)計的要求和思路。然后,選取了最主要的三個程序模塊,介紹了它們的設(shè)計流程和編譯重點。在此基礎(chǔ)上,從軟件去抖和數(shù)字濾波這兩方面討論了系統(tǒng)的抗干擾措施。 5 仿真與調(diào)試5.1 程序調(diào)試5.1.1 調(diào)試的難點軟件的故障只是內(nèi)在錯誤的外部表象,表象和錯誤之間通常沒有明顯的關(guān)聯(lián)。找到真正的原因并消除潛在的錯誤并非易事,從技術(shù)角度發(fā)現(xiàn)錯誤的困難在于: (1)現(xiàn)象和原因的位置可能相差很遠; (2)在糾正某些錯誤的時候,可能此處故障現(xiàn)象暫時消失了,但內(nèi)部錯誤可能并沒有排除; (3)現(xiàn)象可能是不易發(fā)現(xiàn)的人為失誤造成的; (4)錯誤是由時序問題引起的,與處理過程無關(guān); (5)現(xiàn)象是由于輸入狀態(tài)難以準確再現(xiàn)造成的(例如,在實時應(yīng)用中輸入順序是不確定的); (6)現(xiàn)象可能會周期性出現(xiàn),這種情況在軟、硬件結(jié)合的嵌入式系統(tǒng)中經(jīng)常遇到。 5.1.2 軟件調(diào)試步驟軟件的編譯和調(diào)試是要交叉同步進行的,在完成相關(guān)模塊程序的編譯后就要將該程序燒錄到MCU仿真電路中進行調(diào)試,觀察該程序是否能在硬件電路上準確無誤地運行,當(dāng)設(shè)計者完成一個模塊的調(diào)試后,就進入下一個模塊的軟件調(diào)試的步驟。模塊的調(diào)試順序也并不隨意進行的,而是要根據(jù)邏輯關(guān)系來判斷程序的運行順序和他們之間的關(guān)系,從而確定模塊先后調(diào)試順序。 本系統(tǒng)才用的程序編譯軟件是KEIL C51,該軟件是美國Keil軟件公司出品的能夠兼容MCU的C語言的編譯軟件。相比于其他的程序編譯軟件,它具有可視化和模塊化編譯的優(yōu)點。 KEIL C51編譯界面如圖5-1所示。 圖5-1 程序編譯軟件 調(diào)試的過程就是通過對表象的分析找出內(nèi)在錯誤。當(dāng)軟件測試成功后,軟件調(diào)試工作才開始,與前者不同的是,調(diào)試的工作是繼續(xù)排除錯誤。因為有些內(nèi)在錯誤雖然沒有外部故障表現(xiàn)出來,但是它始終會影響系統(tǒng)的穩(wěn)定性和正確性。 一個系統(tǒng)能否完成預(yù)期的功能可以通過設(shè)計者利用相關(guān)的調(diào)試看出來,設(shè)計者通過一些調(diào)試程序來調(diào)用相關(guān)的功能,檢查這些功能是否能夠正常運行。調(diào)試的過程大概分為以下幾個部分: (1)根據(jù)系統(tǒng)的功能來劃分模塊; (2)分別確定這些模塊的流程圖,然后開始編寫對應(yīng)的程序; (3)調(diào)試相應(yīng)的功能模塊的程序,使其完成對應(yīng)模塊的功能要求,然后將各個子程序模塊結(jié)合起來,在主程序中進行調(diào)用; (4)調(diào)試總程序,直到整個程序能完成預(yù)期功能,然后對程序進行修改和簡化操作。 5.2 系統(tǒng)仿真調(diào)試設(shè)計本系統(tǒng)的設(shè)計采用Proteus進行仿真,以便驗證設(shè)計。由于在Proteus中沒有HC-SRO4模型且無法對超聲波器件進行仿真,需要設(shè)計者自行設(shè)計器件模擬HC-SRO4,采用兩個按鍵來調(diào)節(jié)HC-SRO4所測量數(shù)據(jù)的大小,數(shù)據(jù)經(jīng)過單片機處理后在LED上顯示出來,當(dāng)距離小于5cm時,蜂鳴器將會報警。汽車倒車測距儀仿真圖如圖5-2所示: 圖5-2 汽車倒車測距儀仿真圖 6 總結(jié)與展望6.1 總結(jié)本文的主要研究工作時基于超聲波測距技術(shù)的單片機汽車倒車儀設(shè)計,在了解國內(nèi)外該領(lǐng)域的發(fā)展,應(yīng)用和研究現(xiàn)狀后,提出了自己的設(shè)計方案。使用STC89C51單片機作為設(shè)計核心,使用HC-SR04作為超聲波元件,采用模塊化的設(shè)計理念,完成了系統(tǒng)的軟硬件設(shè)計,并在仿真軟件中進行了成功的仿真。仿真結(jié)果表明,本系統(tǒng)擁有較高的準確性和靈敏度,能夠很好的完成工作,系統(tǒng)設(shè)計達到了預(yù)計要求。 本系統(tǒng)可以保證汽車在倒車狀態(tài)下,汽車可以測量后面的障礙物和距離,并且顯示在LCD屏幕上,當(dāng)?shù)竭_危險區(qū)域時,蜂鳴器會產(chǎn)生報警。實驗表明,該測距系統(tǒng)的可靠性和測距算法的有效性較強。雷達最短距離0.2m,最長距離5.0m,測量誤差小于3%。 6.2展望本系統(tǒng)測距的方式僅僅選擇了探頭探測,因此在對后方障礙物的定位方面存在一定缺陷。如果將探頭數(shù)量增加,那么可以實現(xiàn)對物體的準確定位,使系統(tǒng)測量盲區(qū)得到縮小,并與車載網(wǎng)絡(luò)中的相關(guān)設(shè)備組成·個防撞系統(tǒng),將會對汽車和人起到很好的保護作用。 由于該系統(tǒng)的距離測量方法只選擇了探頭的檢測,故而在后方障礙物的定位中存在一定的缺陷。所以可以增加探頭的數(shù)量并使之分布在汽車的四周,這樣就可以實現(xiàn)對物體的精確定位和對汽車四周多方位的距離探測,進而提高行車和倒車時的安全性和可靠性。
全部資料51hei下載地址:
 超聲波測距 仿真.rar
(7.02 MB, 下載次數(shù): 111)
超聲波測距 仿真.rar
(7.02 MB, 下載次數(shù): 111)
2020-6-5 11:31 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 

















 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
