傳感器設(shè)計(jì)時(shí)候使用的C52的單片機(jī) 基本設(shè)計(jì)思路和相關(guān)硬件如附件所呈現(xiàn),
詢問相關(guān)程序的源代碼和原理圖
如何實(shí)現(xiàn)操作實(shí)現(xiàn)實(shí)物成功。
1.1 流水線分類系統(tǒng)的背景
最初的流水線產(chǎn)品分類系統(tǒng)完全是基于人力的工作系統(tǒng),這種原始的分類系統(tǒng)主要是通過人工的分類和物料的搬運(yùn)去實(shí)現(xiàn)對(duì)貨物的分類和提取。在這種物料的分類系統(tǒng)中浪費(fèi)了較多的人、物力和財(cái)力對(duì)貨物進(jìn)行人工查找與人工搬運(yùn)等,從而導(dǎo)致工作的效率太低。尤其是在工作環(huán)境比較惡劣情況下,使用人工分類物料會(huì)讓物料分類的效率更低。上述的工作情況表明這種原始的工作模式明顯不能滿足現(xiàn)代化的物流配送對(duì)速度與準(zhǔn)確性的較高要求,與此同時(shí)它也無法滿足生產(chǎn)企業(yè)的工作要求。因此,人們通過設(shè)計(jì)并制造出自動(dòng)控制的物料輸送分類裝置,讓它代替之前的人工分類的工作方式,從而大大的提高了物料分類的效率。
由于科技的高速發(fā)展,各式各樣的自動(dòng)化設(shè)備被用于物料的分類系統(tǒng)中。計(jì)算機(jī)、控制技術(shù)以及信息技術(shù)已經(jīng)成為信息的傳遞和處理的重要方式,盡管在大多數(shù)的流水線產(chǎn)品分類系統(tǒng)中,有一些作業(yè)環(huán)節(jié)仍然需要有人工的配合,但是工作的強(qiáng)度正在逐漸減小。由純機(jī)械電子分類作業(yè)的自動(dòng)分類系統(tǒng)由于設(shè)備越來越智能化并且更加的適應(yīng)社會(huì)需要,在工業(yè)領(lǐng)域中有較多的采用。這種自動(dòng)分類裝置可以在高溫、腐蝕以及有毒的氣體等危險(xiǎn)環(huán)境下代替人工勞作,從而保護(hù)他們的人身安全。
1.2 流水線分類分類系統(tǒng)的意義
單片機(jī)流水線分類系統(tǒng)采用單片機(jī)進(jìn)行控制,能持續(xù)、快速地分類出不同種類的物體,其誤差率很低而且工作量遠(yuǎn)遠(yuǎn)低于以往,從而不斷地提高了產(chǎn)品的生產(chǎn)效率。并且機(jī)械全自動(dòng)的物質(zhì)分類系統(tǒng)能夠靈活地與其它物流裝置進(jìn)行完美的組合,實(shí)現(xiàn)對(duì)物料輸送流和物料信息流的分配與處理。它的開發(fā)屬于標(biāo)準(zhǔn)的和模塊的組裝,具有護(hù)理、檢測(cè)方便且系統(tǒng)布局靈活等特性,受位置原因的影響也較小。 在使用過程中,只需依照其物料的差異性質(zhì),將原系統(tǒng)相應(yīng)的稍微改變便可簡(jiǎn)單、快捷的達(dá)到工作的需要。
目前工業(yè)上使用單片機(jī)控制是最普遍的自動(dòng)化控制方式,由于它控制較為便捷且可以避免環(huán)境的干擾,所以企業(yè)普遍選用微控制器作為系統(tǒng)的控制中心。物料分類設(shè)備的單片機(jī)控制系統(tǒng)采用單片機(jī)技術(shù)、氣壓傳動(dòng)技術(shù)、定位控制技術(shù)、傳感器技術(shù)以及電機(jī)傳動(dòng)方式等,從而實(shí)現(xiàn)了高效率的物料分類,不僅節(jié)省了企業(yè)不必要的勞動(dòng)力,而且也促進(jìn)了我國(guó)工業(yè)化的發(fā)展!
1.3 控制系統(tǒng)的要求
結(jié)合實(shí)際需求,本流水線分類系統(tǒng)主要實(shí)現(xiàn)以下功能:
控制電機(jī)轉(zhuǎn)動(dòng)實(shí)現(xiàn)傳送帶的驅(qū)動(dòng)傳動(dòng);
能夠精準(zhǔn)識(shí)別流水線貨物大小,并按大小進(jìn)行分類;
實(shí)現(xiàn)控制舵機(jī)左右擺動(dòng),實(shí)現(xiàn)對(duì)大、小產(chǎn)品的分揀;
實(shí)現(xiàn)對(duì)流水線產(chǎn)品的計(jì)數(shù)顯示,及不同型號(hào)產(chǎn)品數(shù)量的統(tǒng)計(jì);
采用液晶顯示屏LCD1602進(jìn)行顯示。液晶顯示屏具有顯示功能強(qiáng)大,可以自己任意設(shè)置顯示內(nèi)容,而且比較美觀,整體控制也比較容易。 方案比較:考慮到系統(tǒng)的顯示功能和控制方式本設(shè)計(jì)采用了LCD1602液晶作為顯示裝置。 2.3 系統(tǒng)總體方案本流水線產(chǎn)品分類系統(tǒng)通過光電傳感器實(shí)現(xiàn)對(duì)產(chǎn)品的計(jì)數(shù)及產(chǎn)品的大小的分類,其中對(duì)計(jì)數(shù)傳感器與分類傳感器的感應(yīng)距離通過調(diào)節(jié)完成,最后實(shí)現(xiàn)計(jì)數(shù)光電傳感器能對(duì)大、小產(chǎn)品同時(shí)計(jì)數(shù),分類光電傳感器能夠?qū)崿F(xiàn)對(duì)大產(chǎn)品、小產(chǎn)品的不同感應(yīng),單片機(jī)通過綜合判斷兩個(gè)傳感器的感應(yīng)情況驅(qū)動(dòng)舵機(jī)進(jìn)行產(chǎn)品分類,并將統(tǒng)計(jì)數(shù)據(jù)顯示于液晶屏上。另外需有傳送帶驅(qū)動(dòng)電機(jī),帶動(dòng)傳送帶運(yùn)動(dòng),系統(tǒng)框圖如圖所示。 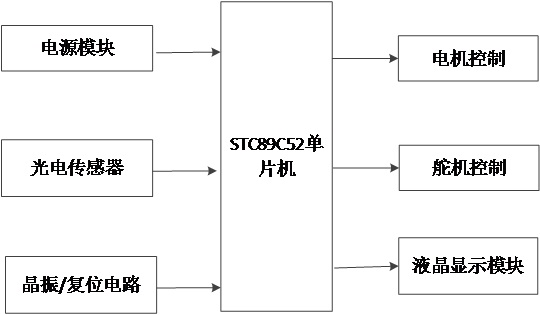
電機(jī)驅(qū)動(dòng)控制電路主要通過單片機(jī)控制電機(jī)驅(qū)動(dòng)芯片L298N,然后再由電機(jī)驅(qū)動(dòng)芯片分別電機(jī)工作帶動(dòng)傳送帶工作,保證其正常運(yùn)轉(zhuǎn),然后其原理如圖3.5所示。 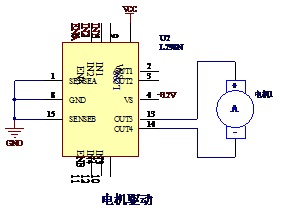
圖3.6 電機(jī)驅(qū)動(dòng)原理圖 3.4 紅外檢測(cè)電路設(shè)計(jì)3.4.1 紅外檢測(cè)模塊該紅外避障傳感器是基于紅外對(duì)管模塊的紅外避障傳感器。該傳感器模塊對(duì)環(huán)境光線適應(yīng)能力強(qiáng),其具有一對(duì)紅外線發(fā)射與接收管,發(fā)射管發(fā)射出一定頻率的紅外線,當(dāng)檢測(cè)方向遇到障礙物(反射面)時(shí),紅外線反射回來被接收管接收,經(jīng)過比較器電路處理之后,綠色指示燈會(huì)亮起,同時(shí)信號(hào)輸出接口輸出數(shù)字信號(hào)(一個(gè)低電平信號(hào)),可通過電位器旋鈕調(diào)節(jié)檢測(cè)距離,有效距離范圍 2~30cm,工作電壓為3.3V-5V。該傳感器的探測(cè)距離可以通過電位器調(diào)節(jié)、具有干擾小、便于裝配、使用方便等特點(diǎn),可以廣泛應(yīng)用于機(jī)器人避障、避障小車、流水線計(jì)數(shù)及黑白線循跡等眾多場(chǎng)合。 一、模塊參數(shù)說明 (1)當(dāng)模塊檢測(cè)到前方障礙物信號(hào)時(shí),電路板上綠色指示燈點(diǎn)亮電平,同時(shí)OUT端口持續(xù)輸出低電平信號(hào),該模塊檢測(cè)距離2~30cm,檢測(cè)角度35°,檢測(cè)距離可以通過電位器進(jìn)行調(diào)節(jié),順時(shí)針調(diào)電位器,檢測(cè)距離增加;逆時(shí)針調(diào)電位器,檢測(cè)距離減少。 (2)傳感器主動(dòng)紅外線反射探測(cè),因此目標(biāo)的反射率和形狀是探測(cè)距離的關(guān)鍵。其中黑色探測(cè)距離最小,白色最大,小面積物體距離小,大面積距離大。 (3)傳感器模塊輸出端口OUT可直接與單片機(jī)IO口連接即可,也可以直接驅(qū)動(dòng)一個(gè)5V繼電器;連接方式:VCC-VCC;GND-GND;OUT-IO。 (4)可采用3-5V直流電源對(duì)模塊進(jìn)行供電。當(dāng)電源接通時(shí),紅色電源指示燈點(diǎn)亮。 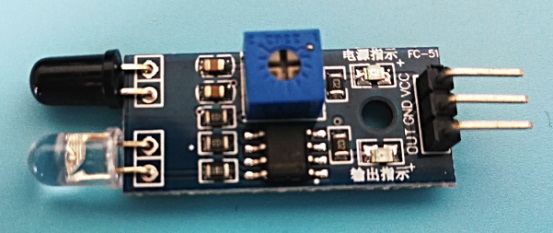
圖3.7 紅外避障模塊實(shí)物圖 3.4.2 紅外檢測(cè)原理圖為滿足本流水線分類系統(tǒng)需求,本系統(tǒng)分別在工設(shè)置兩個(gè)紅檢測(cè)模塊,啟動(dòng)一個(gè)用于計(jì)數(shù),一個(gè)用于分類,原理圖如圖3.8所示。 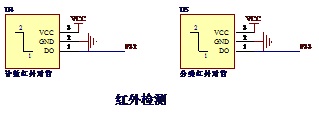
圖3.8 紅外檢測(cè)原理圖
3.5 電源模塊本系統(tǒng)供電除分為12V供電和5V供電,系統(tǒng)輸入220V市電然后進(jìn)行降壓,整流,最后采用LM7805和LM7812穩(wěn)壓芯片進(jìn)行穩(wěn)壓,產(chǎn)生12V和5V系統(tǒng)供電,穩(wěn)壓完成后采用多個(gè)電容進(jìn)行濾波保證電源質(zhì)量,另在電路上設(shè)計(jì)一個(gè)LED發(fā)光二極管進(jìn)行電源指示,詳細(xì)電路圖如圖3.9所示。 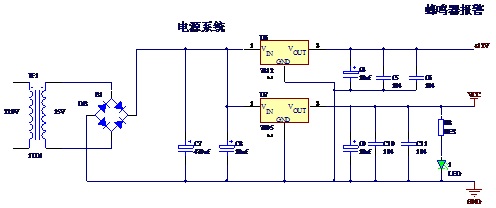
圖3.9 供電電路原理圖 4. 軟件設(shè)計(jì)4.1 程序設(shè)計(jì)系統(tǒng)的程序設(shè)計(jì)(Programming)過程指的是后期整體程序的設(shè)計(jì)、編寫、調(diào)試的方法和過程。它是目標(biāo)明確的智力活動(dòng)。在進(jìn)行大多數(shù)的控制系統(tǒng)的設(shè)計(jì)時(shí)候,除了前期對(duì)整體系統(tǒng)硬件的設(shè)計(jì)外,大量必須的工作就是后期怎樣根據(jù)每個(gè)系統(tǒng)的實(shí)際需要設(shè)計(jì)對(duì)應(yīng)的符合要求的應(yīng)用程序。因此,軟件設(shè)計(jì)在微機(jī)控制系統(tǒng)設(shè)計(jì)中占重要地位。對(duì)于本系統(tǒng),軟件也占有重要的地位。 本系統(tǒng)軟件設(shè)計(jì)由主程序、初始化程序、液晶顯示程序、傳感器檢測(cè)程序、電機(jī)驅(qū)動(dòng)程序、舵機(jī)驅(qū)動(dòng)程序組成。 4.2 主機(jī)主程序系統(tǒng)上電開始工作時(shí)首先執(zhí)行初始化程序,初始化單片機(jī)、液晶顯示及相關(guān)程序參數(shù)初始化。初始化完成后進(jìn)入while循環(huán)主函數(shù),先驅(qū)動(dòng)電機(jī)動(dòng)作帶動(dòng)傳送帶工作,然后開始光電檢測(cè)判斷,當(dāng)分類光電為高電平時(shí)代表檢測(cè)到大號(hào)產(chǎn)品,驅(qū)動(dòng)舵機(jī)左轉(zhuǎn),當(dāng)分類光電檢測(cè)為低電平時(shí)代表檢測(cè)到小號(hào)產(chǎn)品帶動(dòng)光電右轉(zhuǎn),檢測(cè)完成后最后更新液晶顯示,主機(jī)主程序流程圖如圖4.1所示。 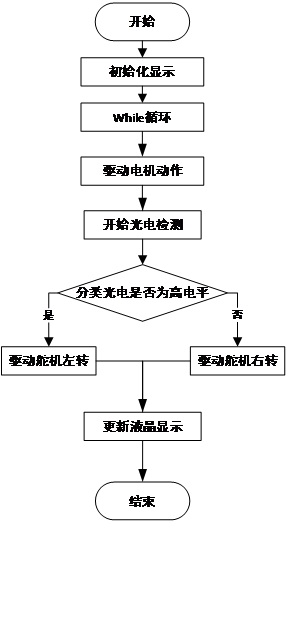
圖4.1 主機(jī)主程序流程圖 4.3 LCD顯示程序流程圖LCD1602液晶顯示器在本系統(tǒng)主要用于顯示當(dāng)前產(chǎn)品計(jì)數(shù)數(shù)值等。首先程序開始后需要對(duì)LCD1602顯示器初始化,將屏幕清空,確保顯示正確。然后設(shè)置顯示內(nèi)容需要顯示的位置,然后再寫入需要寫入的數(shù)據(jù),如完成寫入反饋給單片機(jī),完成單個(gè)字節(jié)的顯示寫入,后續(xù)其他內(nèi)容依照上述步驟依次寫入顯示。顯示流程圖如圖4.2所示。 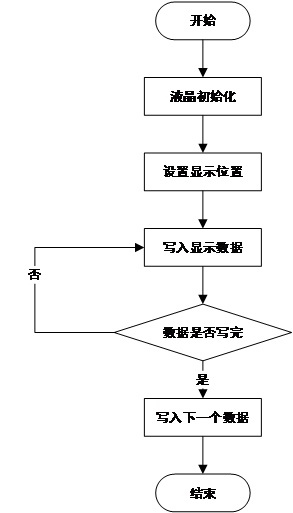
圖4.2 LCD1602液晶顯示器顯示流程圖
以上的Word格式文檔51黑下載地址:
 流水線產(chǎn)品分類.doc
(489.5 KB, 下載次數(shù): 7)
流水線產(chǎn)品分類.doc
(489.5 KB, 下載次數(shù): 7)
2020-12-8 15:50 上傳
點(diǎn)擊文件名下載附件
下載積分: 黑幣 -5
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
