|
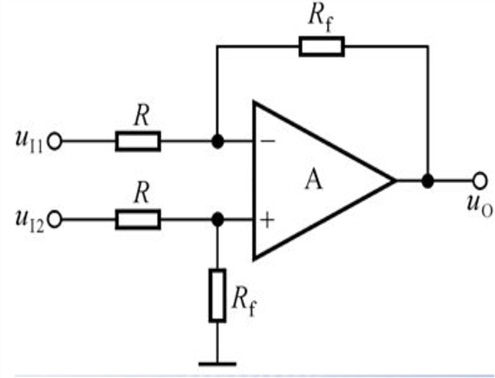
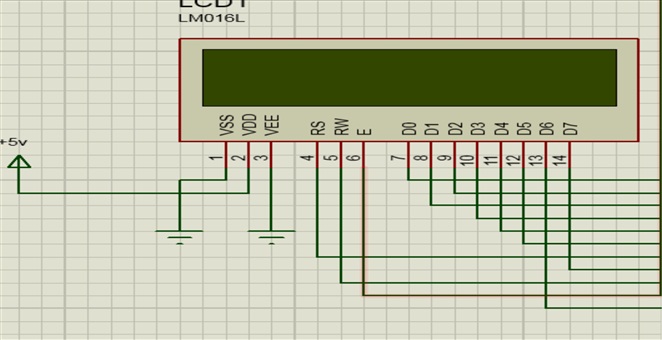
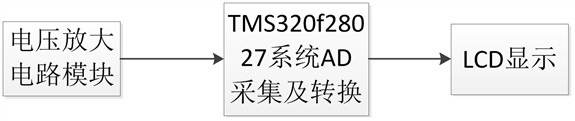
基于TMS320F28027芯片的微弱電壓信號(hào)測(cè)量,熟練掌握DSP開(kāi)發(fā)環(huán)境CCS軟件以及Proteus電路設(shè)計(jì)軟件,掌握微弱電壓的測(cè)量方式,掌握TMS320F28027芯片的基本IO操作、中斷方式、ADC功能的使用,進(jìn)一步了解DSP系統(tǒng)的特點(diǎn)。 基于TMS320F28027芯片的微弱電壓信號(hào)測(cè)量方案包括如下幾部分: 為了便于對(duì)微弱電壓(2*(10-3)*sin(100pi*t))進(jìn)行測(cè)量,設(shè)計(jì)運(yùn)算放大電路對(duì)微弱電壓進(jìn)行放大處理,使得電壓變?yōu)?~3.2V,電路設(shè)計(jì)如下: 電壓計(jì)算公式:Vout=Rf/R*(u11-u12); (2)基于TMS320F28027的電壓信號(hào)采集及轉(zhuǎn)換 TMS320F28027的ADC功能: 1.12位雙采樣保持電路。 2.同時(shí)采樣和序列采樣方式。 3.全范圍電壓輸入,0V到3.3V固定,或者VREFLO到VREFHI可調(diào)。 4.系統(tǒng)時(shí)鐘全頻運(yùn)行,無(wú)需分頻。 5.16輸入通道。 6.16個(gè)SOC配置,設(shè)置觸發(fā),采樣窗口,通道。 7.16個(gè)獨(dú)立保存轉(zhuǎn)換結(jié)果的結(jié)果寄存器。 8.多觸發(fā)源。 9.9個(gè)靈活的PIE中斷 ADC采集電壓計(jì)算公式如下: Vol=(AdcResult.ADCRESULT0)/4096*3.3; (3)電壓的動(dòng)態(tài)顯示 測(cè)量到電壓后進(jìn)行顯示,本次實(shí)驗(yàn)采用LM016L型號(hào)LCD顯示器進(jìn)行電壓顯示。 引腳接口說(shuō)明: 第1腳:VSS為地電源。 第2腳:VDD接5V正電源。 第3腳:VL為液晶顯示器對(duì)比度調(diào)整端,接正電源時(shí)對(duì)比度最弱,接地時(shí)對(duì)比度最高。 第4腳:RS為寄存器選擇,高電平時(shí)選擇數(shù)據(jù)寄存器、低電平時(shí)選擇指令寄存器。 第5腳:R/W為讀寫信號(hào)線,高電平時(shí)進(jìn)行讀操作,低電平時(shí)進(jìn)行寫操作。當(dāng)RS和R/W共同為低電平時(shí)可以寫入指令或者顯示地址,當(dāng)RS為低電平R/W為高電平時(shí)可以讀忙信號(hào),當(dāng)RS為高電平R/W為低電平時(shí)可以寫入數(shù)據(jù)。 第6腳:E端為使能端,當(dāng)E端由高電平跳變成低電平時(shí),液晶模塊執(zhí)行命令。 第7~14腳:D0~D7為8位雙向數(shù)據(jù)線。 LM016L接線如下所示: 指令如下所示:
芯片時(shí)序表如下: | | | | | | | RS=L,R/W=L,D0—D7=指令碼,E=高脈沖 | | | | | | | | | | RS=H,R/W=L,D0—D7=數(shù)據(jù),E=高脈沖 | | |
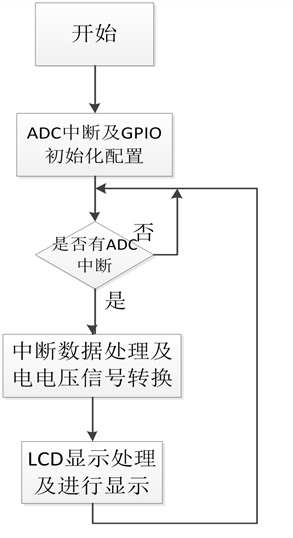
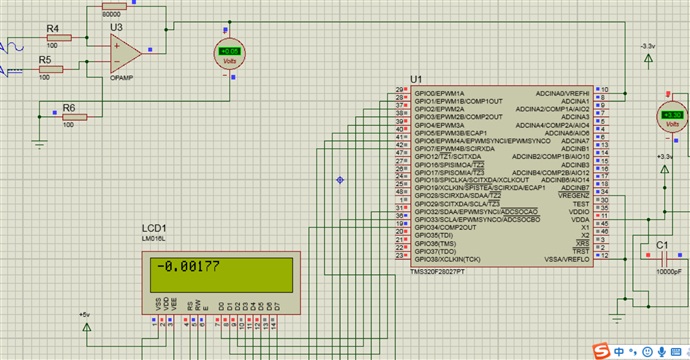
(2)程序流程圖 電路設(shè)計(jì)如下: 程序如下所示: 在Proteus軟件進(jìn)行仿真,仿真結(jié)果截圖如下: LCD顯示小數(shù)點(diǎn)后5位,輸入正弦電壓幅值為0.002,顯示精度為百分之一。

51hei.png (8.65 KB, 下載次數(shù): 75)
下載附件
2021-2-7 15:47 上傳
全部資料51hei下載地址: | 



 [復(fù)制鏈接]
[復(fù)制鏈接]








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩 謝謝樓主
謝謝樓主
