本文提出了一種基于 STM32單片機的低功耗、高性能的自動氣象站數據采集系統設計方案。詳細介紹了系統軟件的設計方法,實現了數據的采集、處理及存儲,并提供良好的 人機交互接口,實現自動氣象站數據的實時顯示與菜單化的界面管理功能。利用ESP8266模塊用wifi將氣象站和移動端相連接,達到遠程數據傳輸和監控氣象數據的目的。
接下來的內容介紹了當前氣象站的發展現狀,分析了一個氣象站需要具備的特性以及功能,確立了氣象站的設計目標以及總體設計方案,并介紹了該氣象站系統的硬件組成及設計理念,分析了所選元器件的優勢及特性。最后通過局域網將氣象站及用戶連接起來,達到實時傳輸數據的功能。
該氣象站從實際應用出發,實現了數據的自動采集及傳輸,具有體積小、成本低、功耗低、采集速度快等優點,經過包裝后能夠在實際應用中協助氣象工作的進行,具有一定的前景。
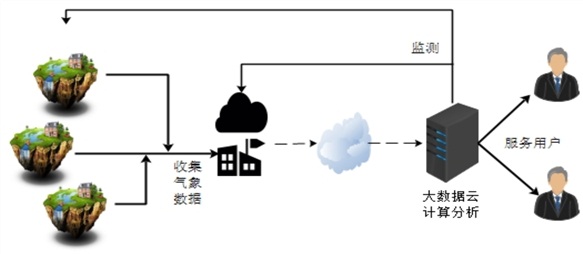
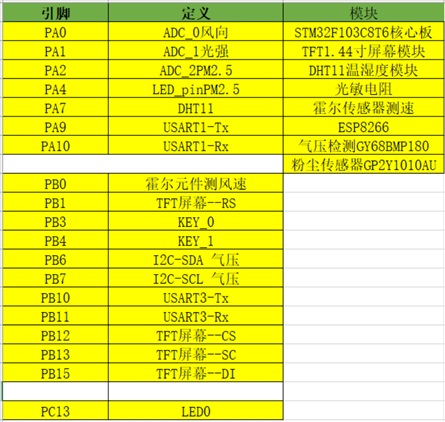
與傳統式氣象采集工具相比較,采用微氣候監測系統作為主要觀測工具將帶來以下明顯優點: (1)擴展氣象觀測的區域與密度 自動氣象站可以工作在惡劣環境下,并且不需要固定工作人員值守。既實現了無人惡劣區 域的氣象信息的觀測又降低了人力成本,提高了社會經濟效益。 (2)提高氣象觀測的可靠性 自動氣象監測系統采用最新技術,傳感器性能相對優異,其采集到的數據準確且可靠,并 且自動氣象站通常采用一定的數據處理算法,進一步提高數據的可靠性。 自動氣象站安裝維護方便,不需要固定人員值守,并且體積小,成本低,與專業人員觀測 相比大大降低了業務費用。 (4)易于遠程監控 多臺自動氣象站通常可以組成觀測網,相互之間通過互聯網進行聯系,觀測人員通過專用 配套軟件可以方便的對各氣象站進行監測與維護。 自動氣象站的核心是氣象傳感器,氣象傳感器的性能直接決定采集到的信息是否可靠準確,一 套自動氣象站是否良好直接受限于氣象傳感器,因此,研發性能優異的氣象傳感器是設計自動氣象 站的首要任務之一。 因此,一個現代的氣象站具有集成度高,無人值守,全天候工作,精度高,可靠性高等一系列優點。 3 系統方案架構及工作原理 設計任務 以stm32為核心,加上多種傳感器組合,將采集到的氣象數據顯示在LCD屏幕上,同時可以通過串口通信以及wifi通信,將采集到的數據實時的傳輸回PC端及移動端。 圖1功能實現流程圖 4 系統硬件設計 總的設計原理圖 圖2 項目原理圖 圖3 項目引腳定義圖 4.1 硬件選型 (1)主板采用的是STM32F103C8T6核心板,性價比高,有著較低廉的的價格以及良好且低耗的性能。 圖4 STM32F103C8T6原理圖 - 顯示屏選用TFT1.44寸屏幕模塊,用于顯示傳感器采集的數據。
- DHT11溫濕度模塊,用于采集溫濕度數據。

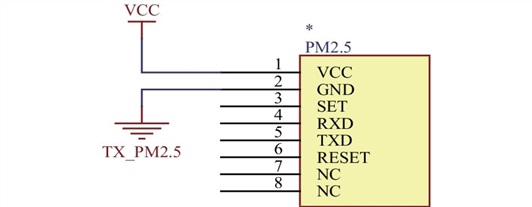
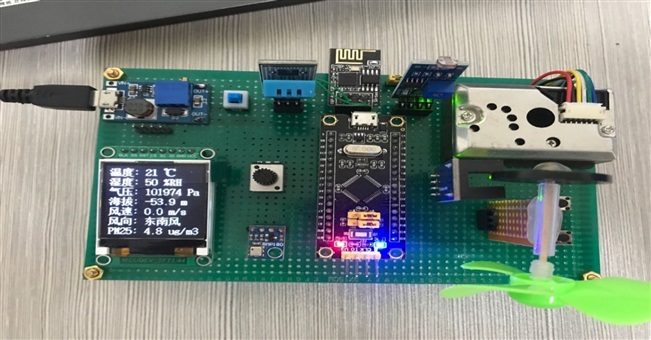
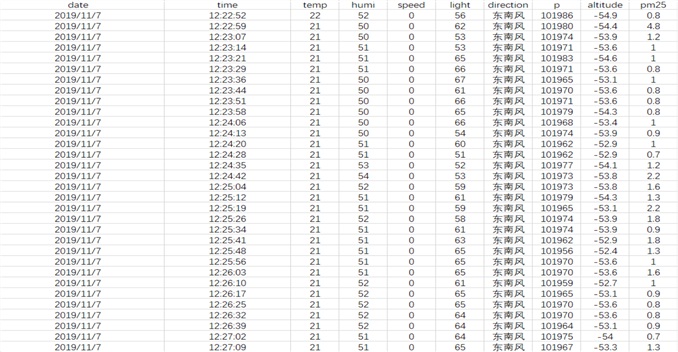
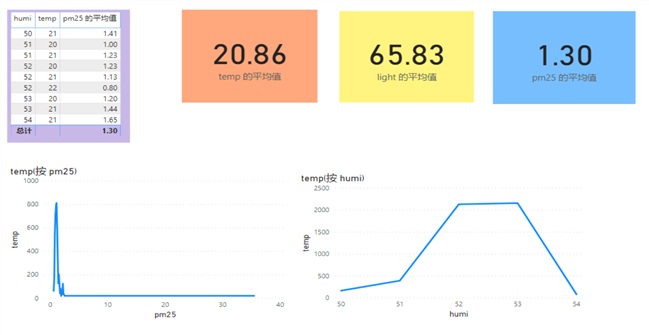
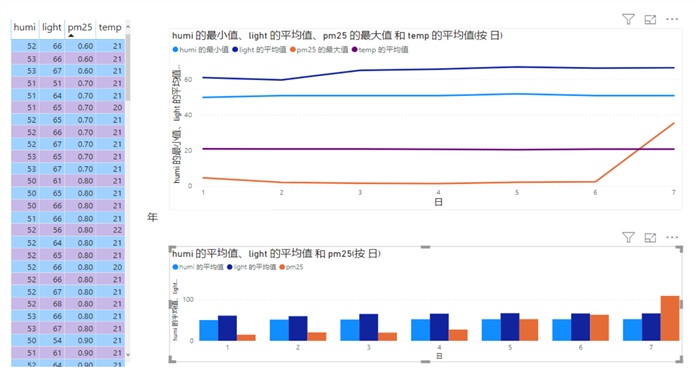
圖5 DHT11溫濕度模塊原理圖 圖6 光敏傳感器原理圖 (5)霍爾傳感器測速模塊,用于采集風速數據。 圖7 霍爾傳感器測速模塊原理圖 (6)ESP8266wifi模塊,通過wifi進行數據傳輸,將數據傳輸回移動端。氣壓檢測模塊,通過氣壓檢測推算出所在地的海拔高度。 圖8ESP8266wifi模塊原理圖 (7) PM2.5模塊,檢測所在地的PM2.5濃度值。 圖8ESP8266wifi模塊原理圖 4.2 功能說明 (1)通過傳感器采集多種氣象數據,將其顯示在屏幕上。 (2)每隔五秒可以通過網絡調試助手傳輸一次數據回PC端 (3)通過wifi模塊將數據傳輸回移動端 圖9 功能說明圖 5 調試與實驗結果 圖10 硬件成品圖 圖11 數據傳回圖 圖12 數據清理后的圖 圖13 BI做的界面圖 6 結束語 本文提出了一種基于STM32單片機的低能耗微氣候監測系統的設計方案。詳細介紹了系統的設計方法,實現了數據的采集、處理和存儲,并提供了良好的人機交互接口。通過ESP8266模塊可以與移動端設備進行實時通信。達到遠程數據實時傳輸和監控的目的。所設計的自動氣象站數據采集系統具有體積小、成本低、功耗低、采集速度快等優點,完全滿足了實際的需要。 - 在硬件方面采用了模塊化的設計,當工作環境變化是只需要將新的模塊加入到系統中并對其進行簡單的配置和升級后即可使用,大大提高了系統的可擴展性。
- 利用了STM32芯片低耗高效的原則,且不采用復雜的嵌入式操作系統軟件設計,使得氣象站低功耗的要求成為現實。
- 設計的人機界面簡潔、直觀、可操作性強,不需要專業的維護人員便可以維持氣象站的運行和簡單的維護功能,提高了系統的靈活性。
本文所設計的氣象數據采集系統觀測精度高、自動化程序高、性價比高,可適應 各種艱苦條件下的工作環境,長時間全天候不間斷地進行氣象要素觀測,具有良好的可靠性和穩定性。這些特點使得系統具有很高的應用價值和廣闊的市場前景。
單片機源程序如下:
- #include "stm32f10x.h"
- #include "delay.h"
- #include "led.h"
- #include "uart.h"
- #include "Lcd_Driver.h"
- #include "TFT_demo.h"
- #include "GUI.h"
- #include "dht11.h"
- #include "speed.h"
- #include "adc.h"
- #include "bmp180.h"
- #include "AT_ESP.h"
- #include "key.h"
-
- u32 TimingDelay = 0; //用于延時函數計數
- u32 dht11_temp; //獲取溫濕度
- u32 temperature_val = 0; //溫度值
- u32 humidity_val = 0; //濕度值
- u16 led_count = 0; //LED計數閃爍
- u16 light_val = 0; //光強值
- u8 ID = 0;
- u8 srr_temp1[200];
- u8 win_direction = 0; //風向值 【1:東南風 2:東風 3:東北風 4:北風 5:西北風 6:西風 7:西南風】
- char *win_str;
- float speed_temp = 0; //霍爾元件計數緩存值
- float speed_val = 0; //風速值
- float pm25_val = 0; //PM2.5值
- _Bool send_flag = 1;
- int main(void)
- {
- SysTick_Config(SystemCoreClock/1000);//系統時鐘初始化
- Delay_Ms(100); //延遲100ms
-
- /****************************第一部分初始化************************************/
- LED_Init(); //LED燈初始化
- Lcd_Init(); //屏幕初始化
- EXTI_KEY_Config();//按鍵初始化
- UART1_Init(); //波特率115200 用于串口調試
- UART3_Init(); //USART3配置 ESP8266串口通訊
-
- dht11_init(); //DHT11溫濕度模塊初始化
- speed_init(); //風速驅動初始化
- ADC1_Init(); //ADC初始化,用于測光照強度、風向、PM2.5
- BMP_Init(); //氣壓驅動初始化
- BMP_ReadCalibrationData(); //從BMP180的獲取計算參數
- Delay_Ms(1000); //延遲200ms
- printf("Init over !\r\n");
- main_Demo(); //顯示主界面
- /****************************第二部分連接WIFI連接服務器************************************/
- Lcd_Clear(BLACK);
- Gui_DrawFont_GBK16(0,60,WHITE,BLACK,"wait for wifi.");
- while(!CheckEsp())Delay_Ms(100);//檢測ESP01
- while(ConnectWiFi("yyt","20000412")==0);//連接指定WIFI
- Lcd_Clear(BLACK);
- Gui_DrawFont_GBK16(25,40,WHITE,BLACK,"Wifi OK !");
- printf("wifi ok!\r\n");
- while(ConnectServer("172.20.10.2","6666",0)==0);
-
- SendStringDataToServer("Connect...");//連接指定TCPServer
- Lcd_Clear(BLACK);
- /****************************第三部分測量數據************************************/
- while(1)
- {
- /*****獲取溫度、濕度*****/
- // dht11_temp = dht11_read();
- // show_dht11(dht11_temp);
- // printf("Moisture :%u%% Temperature:%uC \r\n",temperature_val,humidity_val );
-
- /*****獲取風速*****/
- // speed_val = speed_temp/30.0;
- // printf("speed:%0.2f\r\n",speed_val);
- // speed_temp = 0;
-
- /*****獲取光強*****/
- // light_val = Read_Light();
- // printf("light_val:%u\r\n",light_val);
-
- /*****獲取風向*****/
- // win_direction = Read_Wind();
- // printf("win_dir:%u\r\n",win_direction);
-
- /*****獲取PM2.5*****/
- // pm25_val = Read_PM25();
- // printf("pm25_val:%0.2f\r\n",pm25_val);
-
- /*****獲取大氣壓強*****/
- // ID = BMP_ReadOneByte(0xd0);
- // BMP_UncompemstatedToTrue();
- // printf("ID = %d\t temp = %d.%dC\t Pressure = %ldPa\t Altitude = %.5fm\r\n",ID,bmp180.Temp/10,bmp180.Temp%10,bmp180.p,bmp180.altitude);
-
-
- /*****獲取所有數據*****/
- dht11_temp = dht11_read(); /*****獲取溫度、濕度*****/
- speed_val = speed_temp/30.0;speed_temp = 0; /*****獲取風速*****/
- light_val = Read_Light(); /*****獲取光強*****/
- win_direction = Read_Wind();/*****獲取風向*****/
- pm25_val = Read_PM25(); /*****獲取PM2.5*****/
- ID = BMP_ReadOneByte(0xd0);/*****獲取大氣壓強*****/
- BMP_UncompemstatedToTrue();
-
- //根據風向的ADC值轉化成字符串
- if(win_direction == 1)win_str="東南";
- else if(win_direction == 2)win_str="東 ";
- else if(win_direction == 3)win_str="東北";
- else if(win_direction == 4)win_str="北 ";
- else if(win_direction == 5)win_str="西北";
- else if(win_direction == 6)win_str="西 ";
- else if(win_direction == 7)win_str="西南";
-
- //屏幕顯示數據
- show_data(dht11_temp,speed_val,light_val,win_str,bmp180.p,bmp180.altitude,pm25_val);
-
-
- if(send_flag)//TCP發送數據 KEY控制開關
- {
- snprintf((char *)srr_temp1,sizeof(srr_temp1),
- "{\"Data\":[\"temp\":\"%u\",\"humi\":\"%u\",\"speed\":\"%0.1f\",\"light\":\"%d\",\"direction\":\"%s風\",\"p\":\"%ld\",\"altitude\":\"%.1f\",\"pm25\":\"%0.1f\"]}",
- temperature_val,humidity_val,speed_val,light_val,win_str,bmp180.p,bmp180.altitude,pm25_val);
-
- SendStringDataToServer((char *)srr_temp1);
- }
- Delay_Ms(5000); //延遲
- }
- }
- void SysTick_Handler(void){TimingDelay--;}

51hei.png (5.13 KB, 下載次數: 43)
下載附件
2021-5-2 16:23 上傳
下位機STM32源程序分享:
 基于STM32大棚系統.7z
(5.89 MB, 下載次數: 82)
基于STM32大棚系統.7z
(5.89 MB, 下載次數: 82)
2021-5-2 16:20 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
|

















 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

