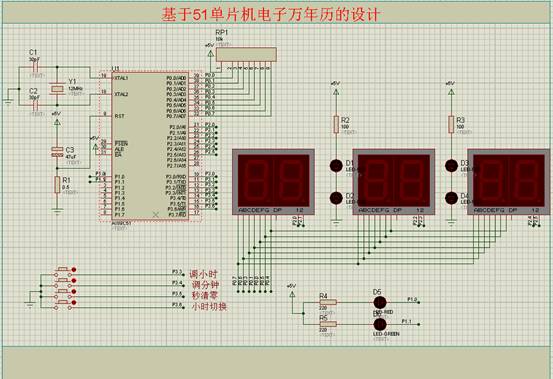
����ԭ��D���£�proteus���湤���ļ��ɵ��������������d��

Proteus�������������:
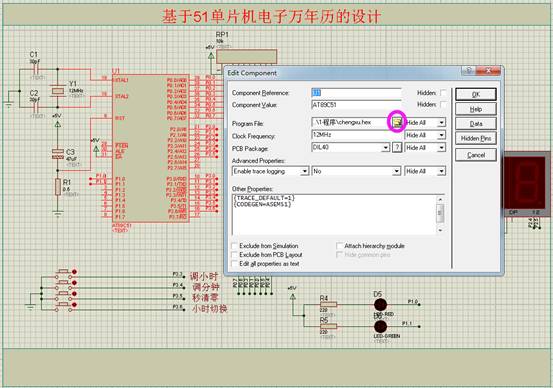
���Eһ�����_����.DSN�ļ�  ����Proteus7.8���_�� ���E�������I�p��U1��Ƭ�C�����_���dHEX�ļ����棬���I�Γ��ļ��A�D��(bi��o)
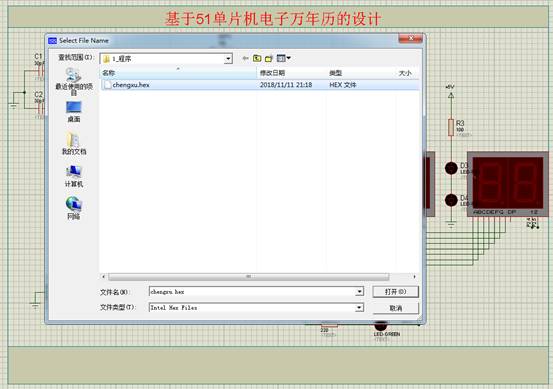
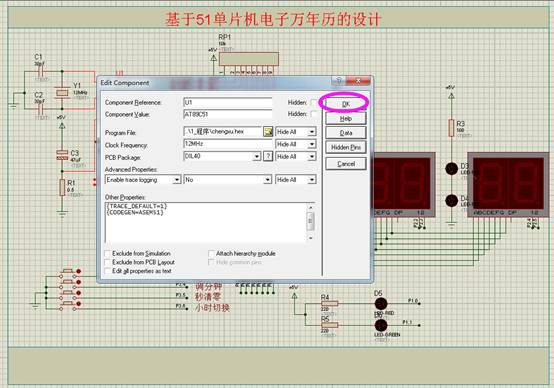
���E�����x��o��1̖Դ�����ļ��A���ҵ�HEX�ļ��� ���E�ģ����I�p�����_HEX�ļ����������E�����棬�c��OK
���E�壺���I�c�����½��\�� 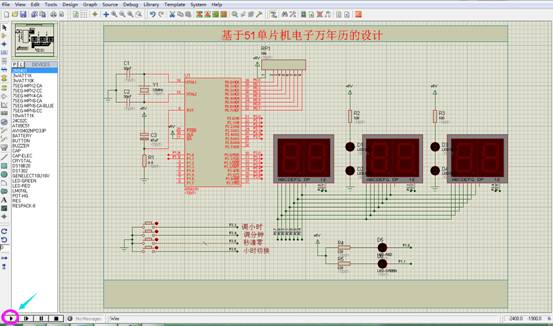
��Ƭ�CԴ��������:
- #include<reg52.h>
- #include<stdio.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
- sbit RS = P2^4;//1602��(sh��)��(j��)/�����x��ˣ�H����(sh��)��(j��)�Ĵ���L��ָ��Ĵ�����
- sbit RW = P2^5;//1602�x/���x���
- sbit E = P2^6;//1602ʹ����̖��
- sbit key1=P3^0;//�����I
- sbit key2=P3^1;
- sbit key3=P3^2;
- sbit key4=P3^3;
- sbit key5=P3^4;
- uchar code B_Rotation[8]={0x7f,0x3f,0xbf,0x9f,0xdf,0xcf,0xef,0x6f}; //���D(zhu��n)����
- uchar code F_Rotation[8]={0xef,0xcf,0xdf,0x9f,0xbf,0x3f,0x7f,0x6f}; //���D(zhu��n)����
- uchar table1[]="dir: + spe:005";
- uchar table2[]="cir:000 ang:000";
- uchar num;
- uint key,flag,speed=5,zflag,znum,fflag,fnum,select,pp,qq;
- //1�Iֵ2�Iֵ��(bi��o)־3�ٶ�4���D(zhu��n)��(bi��o)־5���D(zhu��n)Ȧ��(sh��)6���D(zhu��n)��(bi��o)־7���D(zhu��n)Ȧ��(sh��)8���D(zhu��n)�Ƕ�9���D(zhu��n)�Ƕ�10�x��
- float zang,fang;
- /******************************************************************/
- /* �ӕr����(sh��) Xms */
- /******************************************************************/
- void delay(uint z)
- {
- uint x,y;
- for(x=z;x>0;x--)
- for(y=110;y>0;y--);
- }
- /******************************************************************/
- /* LCD1602��������� */
- /******************************************************************/
- void WriteCommand(uchar com)
- {
- delay(5);//����ǰ�̕��ӕr�����C��̖��(w��n)��
- E=0;
- RS=0;
- RW=0;
- P0=com;
- E=1;
- delay(5);
- E=0;
- }
- /******************************************************************/
- /* LCD1602����(sh��)��(j��)���� */
- /******************************************************************/
- void WriteData(uchar dat)
- {
- delay(5); //����ǰ�̕��ӕr�����C��̖��(w��n)��
- E=0;
- RS=1;
- RW=0;
- P0=dat;
- E=1;
- delay(5);
- E=0;
- }
- /******************************************************************/
- /* 1602��ʼ������ */
- /******************************************************************/
- void InitLcd()//1602��ʼ������
- {
- delay(15);
- WriteCommand(0x38); //display mode
- WriteCommand(0x38); //display mode
- WriteCommand(0x38); //display mode
- WriteCommand(0x06); //��(d��ng)�x��?q��)�һ���ַ����ַָᘼ�һ���ҹ��(bi��o)��һ
- WriteCommand(0x0c); //�@ʾ�_�����(bi��o)���@ʾ
- WriteCommand(0x01); //����
- WriteCommand(0x80);
- for(num=0;num<15;num++)//��һ�е��@ʾ
- {
- WriteData(table1[num]);
- delay(15);
- }
- WriteCommand(0x80+0x40);//�ڶ��е��@ʾ
- for(num=0;num<15;num++)
- {
- WriteData(table2[num]);
- delay(15);
- }
- }
- /******************************************************************/
- /* �����I�P���躯��(sh��) */
- /******************************************************************/
- void keyscan()
- {
-
- P3=0xff;//����P3�ڣ����xȡP3�ڵ�ֵ
- if(key1==0)//�I1������
- {
- delay(5);//�ӕr����
- if(key1==0)
- {
- flag=1;
- }
- while(!key1);
- delay(5);//�ӕr����
- while(!key1);//���֙z�y
- }
- if(key2==0)
- {
- delay(5);
- if(key2==0)
- {
- flag=2;
- }
- while(!key2);
- delay(5);
- while(!key2);
- }
- if(key3==0)//�I1������
- {
- delay(5);//�ӕr����
- if(key3==0)
- {
- flag=3;
- }
- while(!key3);
- delay(5);//�ӕr����
- while(!key3);//���֙z�y
- }
- if(key4==0)
- {
- delay(5);
- if(key4==0)
- {
- flag=4;
- }
- while(!key4);
- delay(5);
- while(!key4);
- }
- if(key5==0)
- {
- delay(5);
- if(key5==0)
- {
- flag=5;
- }
- while(!key5);
- delay(5);
- while(!key5);
- }
- }
- /******************************************************************/
- /* 1602�@ʾ3λ��(sh��) */
- /******************************************************************/
- void write_sfm(uchar add,uint date)//1602�@ʾ
- {
- uchar bai,shi,ge;
- bai=date/100;
- shi=date%100/10;
- ge=date%10;
- WriteCommand(0x80+add);//�O(sh��)�Ô�(sh��)��(j��)��ַָ�
- WriteData(0x30+bai);
- WriteData(0x30+shi);
- WriteData(0x30+ge);
- WriteData(0x20);
- }
- /******************************************************************/
- /* �Iֵ̎�� */
- /******************************************************************/
- void handle_flag()
- {
- uchar select1;
- if(TR0==0&&TR1==0)
- {
- if(flag==1) //���D(zhu��n)
- {
- WriteCommand(0x80+0x05);
- WriteData('+');
- delay(20);
- select=0;
- }
- if(flag==2) //���D(zhu��n)
- {
- WriteCommand(0x80+0x05);
- WriteData('-');
- delay(20);
- select=1;
- }
- if(flag==3)//�D(zhu��n)�ټ�
- {
- speed++;
- if(speed>=12)
- speed=12;
- write_sfm(0x0c,speed);//�@ʾ�ٶ�
- delay(20);
- }
- if(flag==4) //�D(zhu��n)�ٜp
- {
- speed--;
- if(speed<=1)
- speed=1;
- write_sfm(0x0c,speed);//�@ʾ�ٶ�
- delay(20);
- }
- }
- if(flag==5)////�P(gu��n)�]�Дֹ࣬ͣ늙C
- {
- select1++;
- select1%=2;
- if( select1==0)
- {
- TR0=0;
- TR1=0;
- if(select==0)//�@ʾ�D(zhu��n)�ӵĽǶ�
- write_sfm(0x40+0x0c,zang);
- else
- write_sfm(0x40+0x0c,fang);
- }
- else
- {if(select==0)
- {
- TR0=1;//�_���r��0���a(ch��n)�����D(zhu��n)����
- TR1=0;//�P(gu��n)���r��1
- }
- else
- {
- TR1=1;//�_���r��1���a(ch��n)�����D(zhu��n)����
- TR0=0;//�P(gu��n)���r��0
- }
- }
- }
- flag=0;
- }
- void main()
- {
-
- pp=0;
- qq=0;
-
- InitLcd();
- TMOD=0x11;
- EA=1;
- ET0=1;
- ET1=1;
- TH0=(65536-(14648/speed))/256;
- TL0=(65536-(14648/speed))%256;
- TH1=(65536-(14648/speed))/256;
- TL1=(65536-(14648/speed))%256;
- TR0=0;
- TR1=0;
-
- while(1)
- {
- keyscan();
- handle_flag();
- }
- }
- void time0() interrupt 1
- {
- uint zz;
- TH0=(65536-(14648/speed))/256; // 360/(5.625/64)=4096
- //���O(sh��)60���D(zhu��n)һȦ����60���Д�4096�Σ�
- //��ôһ���Д���Ҫ60000000/4096=14648���r�
- //60000000/(4096*speed) zflag=4096�rһȦ
- TL0=(65536-(14648/speed))%256;
- zz%=8;
- P1=F_Rotation[zz]; //ݔ������(y��ng)����
- zz++;
- zflag++;
- if(zflag==4096) //���D(zhu��n)��һȦ
- {
- zflag=0;
- znum++;
- write_sfm(0x40+0x04,znum);
- }
- if(zflag%64==0)//Ӌ�����D(zhu��n)�ӵĽǶ�
- {
- pp++;
- zang=(uint)(pp*5.625);
- if(zang==360)
- pp=0;
- write_sfm(0x40+0x0c,zang);
- }
- //zang=0.088*zflag;
- //write_sfm(0x40+0x0c,zang);
- }
- void time1() interrupt 3
- {
-
- uint ff;
- TH1=(65536-(14648/speed))/256;
- TL1=(65536-(14648/speed))%256;
- ff%=8;
- P1=B_Rotation[ff]; //ݔ������(y��ng)����
- ff++;
- fflag++;
- if(fflag==4096) //���D(zhu��n)��һȦ
- {
- fflag=0;
- fnum++;
- write_sfm(0x40+0x04,fnum);
- }
- if(fflag%64==0)//Ӌ�㷴�D(zhu��n)�ӵĽǶ�
- {
- qq++;
- fang=(uint)(qq*5.625);
- if(fang==360)
- qq=0;
- write_sfm(0x40+0x0c,fang);
- }
- }
Keil4���a�cProteus7.5,8.8�������d:
 �Y��.7z
(388.36 KB, ���d��(sh��): 166)
�Y��.7z
(388.36 KB, ���d��(sh��): 166)
2022-5-2 04:50 �ς�
�c���ļ������d����
|


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664