FTDI 驅動在arduino-0022.zip包里 解壓縮后的目錄是 \arduino-0022\drivers\FTDI USB Drivers
【注意:需要先插入FTDI到電腦的USB 按提示搜索驅動后安裝驅動即可】
如果您是WINDOWS系統用戶 那么請先安裝JAVA插件
http://www.java.com/zh_CN/download/windows_ie.jsp?locale=zh_CN 安裝即可
【注意:需要連接網絡才可以安裝此安裝文件】
目錄application.windows
執行MultiWiiConf*_*.exe【版本不同文件名不同】
運行GUI調試軟件的時候必須關閉 arduino-0022 因為FTDI不能同時運行在兩個程序里。
首先連接好飛控和FTDI、接收機運行GUI軟件
 如上圖 先選擇FTDI的COM口 然后 點擊START 開始 在點擊READ 讀取飛控數據!
如上圖 先選擇FTDI的COM口 然后 點擊START 開始 在點擊READ 讀取飛控數據!

首先是遙控器搖桿正反向檢查和舵量調整。打開遙控器。看上圖
1、推油門【THROTTLE狀態條向上運動】收油門【THROTTLE狀態條向下運動】2、推俯仰【PITCH 狀態條向上運動】 拉俯仰【PITCH 狀態條向下運動】
3、副翼打左邊【ROLL 狀態條向左運動】 副翼打右邊【ROLL 狀態條向右運動】
4、方向舵打左邊【YAW 狀態條向左運動】 方向舵打右邊【YAW 狀態條向右運動】
5、如果您接收機與飛控連接了AUX1為某開關通道,請撥動此開關注意GUI里的AUX1狀態條同樣有變化。
以上操作如果出現反向的請您設置遙控器通道反向以實現上面的動作要求。
其次就要調整遙控器的舵量。
1、當所有通道在中立點的時候查看GUI窗口里數值是不是在1500左右【數值偏差+ - 5】
2、當所有通道在最低點的時候查看GUI窗口里數值是不是在1095左右【數值偏差+ - 5】
3、當所有通道在最高點的時候查看GUI窗口里數值是不是在1905左右【數值偏差+ - 5】
如果您在操作遙控器搖桿的時候,不是以上數值請您修改遙控器舵量設置并達到以上動作要求。
下面是對傳感器的校準
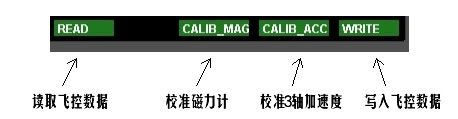 如上圖 校準飛控各個傳感器 【飛控板或者飛機水平放置 然后分別點擊 CALIB_ACC CALIB_MAG
如上圖 校準飛控各個傳感器 【飛控板或者飛機水平放置 然后分別點擊 CALIB_ACC CALIB_MAG 點擊CALIB_ACC 10秒后加速度傳感器校準成功。 再點擊CALIB_MAG 后有你有30秒來旋轉電路板, x,y,z軸至少360度 這時飛控板LED1燈閃爍,閃爍停止三軸電子羅盤校準完成】
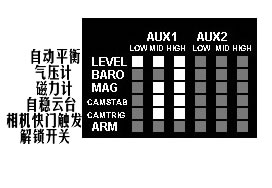 如上圖 設置AUX1 遙控接收第5通道連接主板AUX1
如上圖 設置AUX1 遙控接收第5通道連接主板AUX1然后依據上圖所示 根據個人需要 設置 5通3段開關分別對應的功能
【點白為功能開啟,選好后 需要點WRITE 寫入數據,然后在點 READ確認是否寫入成功】
 如上圖
如上圖RC rate: 定義pitch 和 roll 遙控器靈敏度, 如果感到反應太靈敏, 減小該值。如果想增加pitch 和 roll 遙控器靈敏度,增大該值。
RC expo: 定義PITCH 和 ROLL 遙控器搖桿中心點平滑區域, 該功能可以同時提高遙控精確度和幅度。
【一般的遙控器也可以實現該功能,但是最好用上述參數來設置】
 如上圖設置各個參數的PID數值
如上圖設置各個參數的PID數值{RATE 不是用來增加穩定性而是增加操控性 0.00= 初學者(FPV 或航拍) 0.40-0.70 是特技模式 1.00是空翻模式,如果不擅長飛行,請設置為0.00。}
該數值可以實現大油門狀態下爬升的穩定性。如果不擅長飛行,請設置為0.00。
【注意:用鼠標點住需要調整的數字左右移動修改】
【網絡搜集】PID三個參數的直觀作用:
- P(比例):這是一個增益因子,當多軸飛行器受風等的影響發生向一邊傾斜時,P值直接決定多軸飛行器的抵抗這種傾斜的力的大小。P越大,多軸飛行器抵抗意外傾斜的能力越強,但P過于大時會引起多軸飛行器抖動甚至猛烈側翻。P越小,多軸飛行器抵抗意外傾斜的能力越弱,但P過小時會引起多軸飛行器自平衡能力不足甚至朝一邊側翻(如順著風的方向)。
- I(積分):這個參數決定了飛行控制器對過往飛行狀態的依賴程度。如果I值太小,會使飛行器過度依賴當前的誤差,不能抑制“過敏”現象,從而造成飛行顛簸;如果I值太大,則會過度削弱系統對誤差的反應能力,造成反應遲緩。
- D(微分):一旦多軸飛行器發生傾斜,則認為多軸飛行器會繼續向同一方向傾斜,合適的D參數的能有效抑制未來可能發生的傾斜。如果D值太小,您會覺得多軸飛行器反應不夠靈敏;如果D值太大,也會引起“過敏”。相較于P而言,D反映得更多的是靈敏度,而P反映的是糾正誤差的力度。
----------------------【模友人間失格翻譯整理】-----------------------
MultiWii飛行器的PID調試原理和配置指南
(注意:此指南仍在完善中)
Proportional-Integral-Derivative
比例(P)-積分(I)-微分(D)
當飛行器在Pitch/Roll/Yaw*這三軸中有任何方向的改變,陀螺儀將輸出一個相對初始位置的偏差量,飛控板接收此偏差量并通過PID算法程序,控制電機的輸出使飛行器回到初始位置.
偏差量的數據組合,基本上是過去的變化值和對未來變化的預測值,這為飛控板提供了足夠的信息控制電機,使飛行器回到平衡的狀態
(*Pitch-俯仰 Roll-橫滾 Yaw-方向)
P是PID三者中最主要的部分
在地面的基本PID參數調試
將PID參數還原為默認值
小心并牢固的使飛行器騰空(比如抓在手中)
增加油門,使電機啟動,開始感覺到升力
讓飛行器往每個電機的方向傾斜一次,你應該感覺到有反作用力在阻止你使飛行器傾斜
改變P的大小,直到使隨意傾斜飛行器變得困難(沒打開自穩時,飛控板會允許姿態呈現斜度,這是正常的)
現在,嘗試著搖晃飛行器.增大P直到出現抖動,然后減小一點
重復上述動作調試好Yaw軸
現在飛行器的參數已經適合進行試飛調試了.
高級調試部分-對P.I.D的理解
P-糾正飛行姿態回到初始平衡位置的力量大小.
力量的大小與初始位置的偏差值減去接收機信號發出的控制趨向呈比例關系*
一個較高的P值會造成一個較大的力抵抗飛行器偏離平衡狀態
如果P值過高,在飛行器回中時,會修正過量,使飛行器需要再次反向修正補償,這會導致飛行器來回晃動直到重新平衡,或者持續晃動并增大幅度直到失去平衡
增大P值:
飛行器將更加穩定,直到P值過高,出現抖動并失去控制
需要注意:飛行器的任何位移都會有非常大的力進行修正
減小P值:
飛行器將會開始偏移,直到P值過低,飛行器變得非常不穩定
當改變方向時,修正的力更小
特技飛行:需要略高的P值
普通平飛:需要略低的P值
I-對初始偏差值進行采樣和取平均值的時間周期長度
I值使修正偏差的力有一個過程,延長了偏差存在的時間,此時力隨著時間增長,直到達到力的最大值
一個比較高的I值可以增加航向的穩定性
增大I值:
增加穩定保持在平衡位置的能力和減小漂移,但同時會降低回中的反應速度,
會降低P的效果
減小I值:
會增快對變化的反應速度,但同時會增大漂移和降低保持平衡的能力
會增加P的效果
特技飛行:需要略低的I值
普通平飛:需要略高的I值
D-飛行器回到平衡的速度
一個較高的D值(此參數與其數字相反,高D值意味著數字反而小,比如一個接近0的數)將會使飛行器以非常快的速度回到平衡
增大D值(即減小數字):
更快的回中速度,同時大大增加修正過量和抖動的幾率
會增加P值的效果
減小D值:
回中速度變慢,同時導致回中過程中的抖動(不同于修正過量的抖動)
會降低P值的效果
特技飛行:增大D(即減小數字)
普通平飛:減小D(即增大數字)
高級調試部分-實際應用
(僅供參考)
關于PID的設置 下面是英文原文
PID tuning theory and configuration guide for MultiRotorCraft
(CAVEAT- this is STILL under construction - feedback is wanted / needed)
Proportional-Integral-Derivative
When the MultiRotor orientation is changed in any pitch/roll/yaw axis, the gyros indicate an angular change from it's initial position.
The MultiRotor controller records the original position and by utilising a "PID" program loop, drives the motors to attempts to return the MultiRotor to its initial position.
This is done my a combination of the measured angular deviation, sampling the change over time and predicting the future position. This provides enough information for the controller to drive the motors to return equilibrium.
P is the dominant part of PID and gets you in the ballpark for good flight characteristics.
Basic PID Tuning - on the ground
Set PID to the designers default recommended settings
Hold the MulitiRotor securely and safely in the air
Increase throttle to the hover point where it starts to feel light
Try to lean the MultiRotor down onto each motor axis
You should feel a reaction against your pressure for each axis.
Change P until it is difficult to move against the reaction. Without stabilisation you will feel it allow you to move over a period of time. That is OK
Now try rocking the MultiRotor. Increase P until it starts to oscillate and then reduce a touch.
Rrepeat for Yaw Axis.
Your settings should now be suitable for flight tuning.
Advanced Tuning - understanding impact of P, I and D
P - this is the amount of corrective force applied to return the MultiRotor back to its initial position.
The amount of force is proportional to a combination of the the deviation from initial position minus any command to change direction from the controller input.
A higher P value will create a stronger force to resist any attempts to change it's position.
If the P value is too high, on the return to initial position, it will overshoot and then opposite force is needed to compensate. This creates an oscillating effect until stability is eventually reached or in severe cases becomes completely destabilised.
Increasing value for P:
It will become more solid/stable until P is too high where it starts to oscillate and loose control
You will notice a very strong resistive force to any attempts to move the MultiRotor
Decreasing value for P:
It will start to drift in control until P is too low when it becomes very unstable.
Will be less resistive to any attempts to change orientation
Aerobatic flight: Requires a slightly higher P
Gentle smooth flight: requires a slightly lower lower P
I - this is the time period for which the angular change is sampled and averaged.
The amount of force applied to return to initial position gets is increased the longer the deviation exists until a maximum force value is reached
A higher I will increase the heading hold capability
Increasing value for I:
Increase the ability to hold overall initial position and reduce drift, but also increase the delay in returning to initial position
Will also decrease the importance of P.
Decreasing value for I:
Will improve reaction to changes, but increase drift and reduce ability to hold position
Will also increase the importance of P.
Aerobatic flight: Requires a slightly lower I
Gentle smooth flight: Requires a slightly higher I
D - this is the speed at which the MultiRotor is returned to its original position.
A higher D (as it is negative value this means a lower number - i.e. closer to zero) will mean the MultiRotor wil snap back to its initial position very quickly
Increasing value for D: (remember, that means a LOWER number as it is a negative value)
Improves the speed at which deviations are recovered
With fast recovery speed comes a higher probability of overshooting and oscillations
Will also increase the effect of P
Decreasing value for D: (remember, that means a HIGHER number as it is a negative value - i.e. further from zero)
Reduces the oscillations when returning any deviations to their initial position
Recovery to initial position becomes slower
Will also decrease the effect of P
Aerobatic flight: Increase D (remember, that means a LOWER number as it is a negative value - i.e. closer to zero)
Gentle smooth flight: Decrease D (remember, that means a HIGHER number as it is a negative value - i.e. further from zero)
Advanced Tuning - practical implementation
(at this moment - these are proposals only!)
For Aerobatic flying:
Increase value for P until oscillations start, then back of slightly
Change value for I until until hover drift is unacceptable, then increase slightly
Increase value for D (remember, that means a LOWER number as it is a negative value - i.e. closer to zero) until recovery from dramatic control changes results in unacceptable recovery oscillations
P may now have to be reduced slightly
For stable flying (RC):
Increase value for P until oscillations start, then back of slightly
Change value for I until recovery from deviations is unacceptable, then increase slightly
Decrease value for D (remember, that means a HIGHER number as it is a negative value - i.e. further from zero) until recovery from dramatic control changes becomes too slow. Then Increase D slightly (remember - lower number!)
P may now have to be reduced slightly
For stable flying ( AP / FPV):
Increase value for P until oscillations start, then back of slightly
Change value for I until recovery from deviations is unacceptable, then increase slightly
Decrease value for D (remember, that means a HIGHER number as it is a negative value - i.e. further from zero) until recovery from dramatic control changes becomes too slow. Then Increase D slightly (remember - lower number!)
P may now have to be reduced slightly
You will have to accept a compromise of optimal settings for stable hover and your typical mode of flying. Obviously factor it towards your most common style.
Other factors affecting PID
Taking known good PID values from an identical configuration will get you close, but bear in mind no two MultiRotors will have the same flying characteristics and the following items will have an impact on actual PID values:
Frame weight /size / material / stiffness
Motors - power / torque /momentum
Position - Motor-->motor distance
ESC / TX - power curves
Prop - diameter / pitch / material
BALANCING
Pilot skills
References






