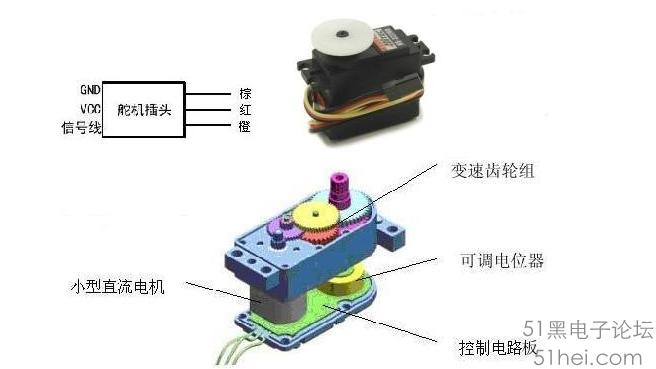
控制信號由接收機的通道進入信號調制芯片,獲得直流偏置電壓。它內部有一個基準電路,產生周期為20ms,寬度為1.5ms的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。最后,電壓差的正負輸出到電機驅動芯片決定電機的正反轉。當電機轉速一定時,通過級聯減速齒輪帶動電位器旋轉,使得電壓差為0,電機停止轉動。
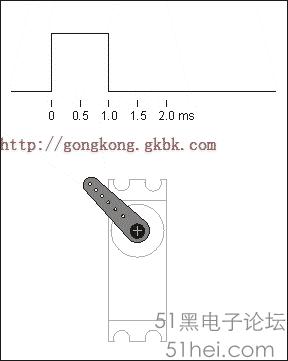
舵機的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms-2.5ms范圍內的角度控制脈沖部分,總間隔為2ms。以180度角度伺服為例,那么對應的控制關系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
(1)舵機的追隨特性 假設現在舵機穩定在A點,這時候CPU發出一個PWM信號,舵機全速由A點轉向B點,在這個過程中需要一段時間,舵機才能運動到B點。  保持時間為Tw
保持時間為Tw 當Tw≥△T時,舵機能夠到達目標,并有剩余時間; 當Tw≤△T時,舵機不能到達目標; 理論上:當Tw=△T時,系統最連貫,而且舵機運動的最快。 實際過程中w不盡相同,連貫運動時的極限△T比較難以計算出來。 假如我們的舵機1DIV =8us,當PWM信號以最小變化量即(1DIV=8us)依次變化時,舵機的分辨率最高,但是速度會減慢。
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

