|
1. ��(y��ng)�ñ���1.1 ����(w��n)�B(t��i)�l(f��)��ԭ�� ��FPGAϵ�y(t��ng)�У������(sh��)��(j��)��ݔ�в��M(m��n)���|�l(f��)����Tsu��Th���M(m��n)�㣬���ߏ�(f��)λ�^(gu��)���Џ�(f��)λ��̖(h��o)��ጷ�����(du��)����Ч�r(sh��)��صĻ֏�(f��)�r(sh��)�g��recovery time�����M(m��n)�㣬�Ϳ��ܮa(ch��n)������(w��n)�B(t��i)���˕r(sh��)�|�l(f��)��ݔ����Q����Ч�r(sh��)���֮����^�L(zh��ng)��һ�Εr(sh��)�g̎�ڲ��_���Ġ�B(t��i)�����@�Εr(sh��)�g��Q����0��1֮�g̎����ʎ��B(t��i)�������ǵ��ڔ�(sh��)��(j��)ݔ���D��ֵ���@�Εr(sh��)�g�Q(ch��ng)��Q���r(sh��)�g��resolution time������(j��ng)�^(gu��)resolution time֮��Q�ˌ���(w��n)����0��1�ϣ����Ƿ�(w��n)����0����1�����S�C(j��)�ģ��cݔ��](m��i)�б�Ȼ���P(gu��n)ϵ�� 1.2 ����(w��n)�B(t��i)�l(f��)����(ch��ng)�� ֻҪϵ�y(t��ng)���Ю���Ԫ��������(w��n)�B(t��i)���ǟo(w��)������ģ�����(w��n)�B(t��i)��Ҫ�l(f��)���ڮ�����̖(h��o)�z�y(c��)����r(sh��)�����̖(h��o)��ݔ�Լ���(f��)λ�·�ȳ����O(sh��)Ӌ(j��)�С� 1.3 ����(w��n)�B(t��i)Σ�� ���ڮa(ch��n)������(w��n)�B(t��i)�Ĵ���Q��ݔ���ڷ�(w��n)����(l��i)֮ǰ������ë�̡���ʎ���̶���ijһ늉�ֵ������̖(h��o)��ݔ�Юa(ch��n)������(w��n)�B(t��i)�͕�(hu��)��(d��o)���c�����B������(sh��)�ֲ�������������ͬ���Д࣬�е��Дൽ��1���е��Дൽ��0�����е�Ҳ�M(j��n)���ˁ���(w��n)�B(t��i)����(sh��)�ֲ����͕�(hu��)߉��y���ڏ�(f��)λ�·�Юa(ch��n)������(w��n)�B(t��i)���ܕ�(hu��)��(d��o)��(f��)λʧ������ô���́���(w��n)�B(t��i)�l(f��)���ĸ��ʳ���FPGA�O(sh��)Ӌ(j��)��Ҫ��ҕ��һ��(g��)ע�����(xi��ng)��
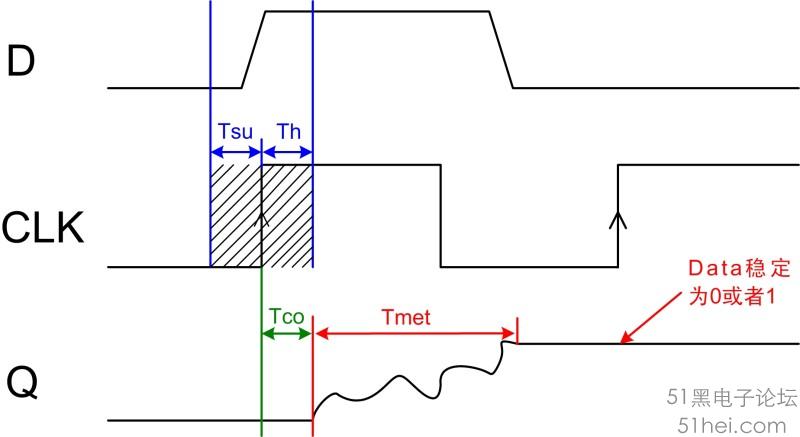
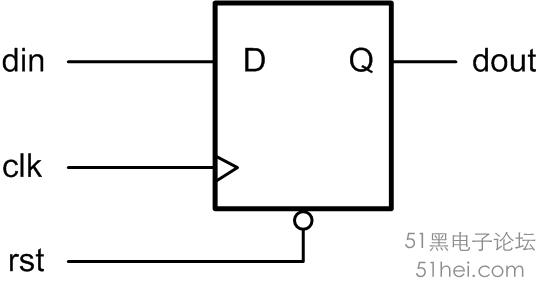
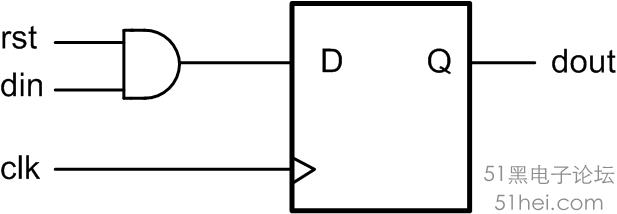
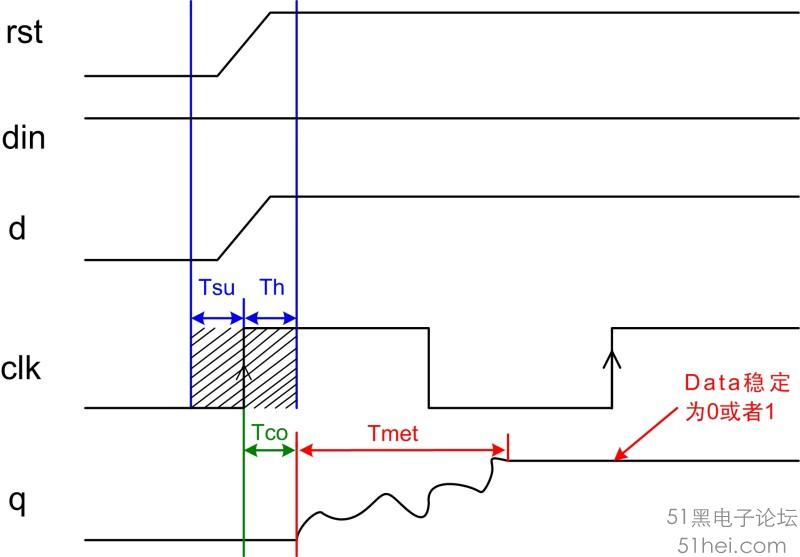
2. ��Փ����2.1 ��̖(h��o)��ݔ�еā���(w��n)�B(t��i) ��ͬ��ϵ�y(t��ng)�У�ݔ����̖(h��o)����ϵ�y(t��ng)�r(sh��)�ͬ�����܉��_(d��)���Ĵ����ĕr(sh��)��Ҫ�����ԁ���(w��n)�B(t��i)����(hu��)�l(f��)��������(w��n)�B(t��i)��(w��n)�}ͨ���l(f��)����һЩ��r(sh��)�����̖(h��o)��ݔ�Լ�������̖(h��o)�ɼ��ϡ� �����l(f��)����ԭ�����£� ��1���ڿ�r(sh��)�����̖(h��o)��ݔ�r(sh��)������Դ�Ĵ����r(sh��)犺�Ŀ�ļĴ����r(sh��)�����δ֪������Դ�Ĵ�����(sh��)��(j��)�l(f��)����(sh��)��(j��)����(sh��)��(j��)�������κΕr(sh��)�g���_(d��)�����r(sh��)����Ŀ�ļĴ��������ԟo(w��)�����C�M(m��n)��Ŀ�ļĴ���Tsu��Th��Ҫ�� ��2���ڮ�����̖(h��o)�ɼ��У����ڮ�����̖(h��o)����������r(sh��)�g�c(di��n)���_(d��)Ŀ�ļĴ���������Ҳ�o(w��)�����C�M(m��n)��Ŀ�ļĴ���Tsu��Th��Ҫ�� ��(d��ng)��(sh��)��(j��)��Ŀ�ļĴ���Tsu-Th�r(sh��)�g���ڰl(f��)��׃����Ҳ����(d��ng)��(sh��)��(j��)�Ľ����r(sh��)�g���߱��֕r(sh��)�g���M(m��n)��r(sh��)���Ϳ��ܰl(f��)������(w��n)�B(t��i)�F(xi��n)����D3.1��ʾ�� �D3.1 ����(w��n)�B(t��i)�a(ch��n)��ʾ��D �ɈD��֪����(d��ng)�a(ch��n)������(w��n)�B(t��i)��Tco�r(sh��)�g���(hu��)��Tmet���Q���r(sh��)�g������ʎ�r(sh��)�g�Σ���(d��ng)��ʎ�Y(ji��)���ص���(w��n)����B(t��i)�r(sh��)�顰0�����ߡ�1�����@��(g��)���S�C(j��)�ġ���ˣ���(hu��)��(du��)���m(x��)�·�Д����Ӱ푡� 2.2 ��(f��)λ�·�ā���(w��n)�B(t��i)2.2.1 ������(f��)λ�·�ڏ�(f��)λ�·�O(sh��)Ӌ(j��)�У���(f��)λ��̖(h��o)�������Ǯ����ģ����î�����(f��)λ�·Verilog�������£� always @(posedge clk or negedge rst_n) begin if(!rst_n) a <= 1��b0; else a <= b; end �C�ϳ���(l��i)��(f��)λ�·ģ����D3.2��ʾ��
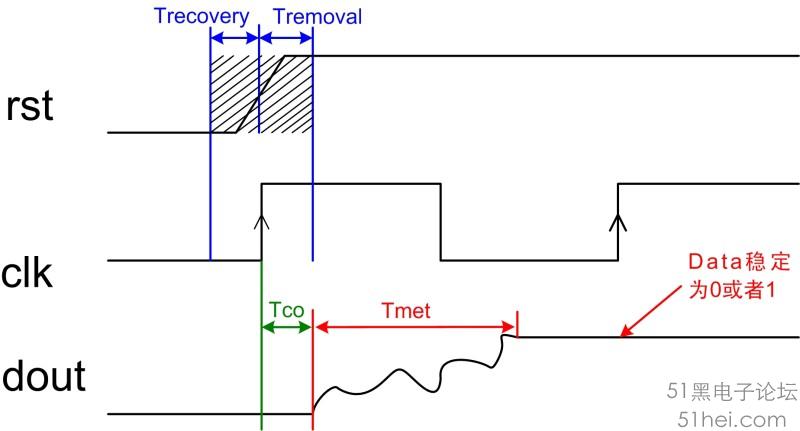
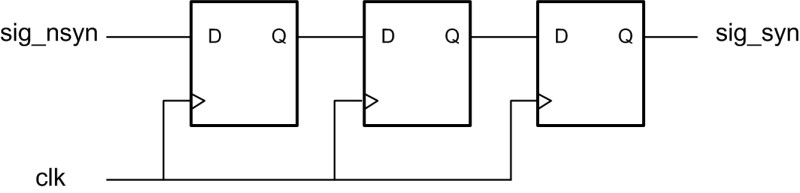
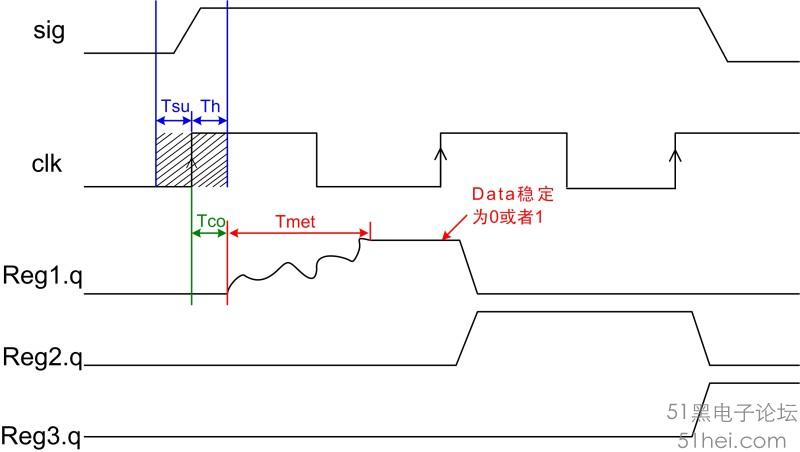
�D3.2 ������(f��)λ�·ģ�� ��D3.3��ʾ�����(f��)λ�·��(f��)λ�r(sh��)��D�����������(f��)λ��̖(h��o)�ij��N(xi��o)�r(sh��)�g��Trecovery���֏�(f��)�r(sh��)�g����Tremoval���Ƴ��r(sh��)�g��֮��(n��i)���DŽ�(sh��)����Ɂ���(w��n)�B(t��i)�Įa(ch��n)����ݔ���ڕr(sh��)�߅�ص�Tco���(hu��)�a(ch��n)����ʎ����ʎ�r(sh��)�g��T(m��n)met���Q���r(sh��)�g������K��(w��n)������0�����ߡ�1�����͕�(hu��)������ɏ�(f��)λʧ���� �D3.3 ������(f��)λ�r(sh��)�� 2.2.2 ͬ����(f��)λ�·�ā���(w��n)�B(t��i) �ڏ�(f��)λ�·�У����ڏ�(f��)λ��̖(h��o)�Ǯ����ģ���ˣ���Щ�O(sh��)Ӌ(j��)����ͬ����(f��)λ�·�M(j��n)�Џ�(f��)λ�����ҽ^�����(sh��)�Y�ό�(du��)��ͬ����(f��)λ�·���J(r��n)�鲻��(hu��)�l(f��)������(w��n)�B(t��i)���䌍(sh��)��Ȼ��ͬ���·Ҳ��(hu��)�l(f��)������(w��n)�B(t��i)��ֻ�ǎ���С�ڮ�����(f��)λ�·�� ������verilog���a��(du��)ͬ����(f��)λ�·�������� always @(posedge clk) begin if(!rst_n) a <= 1��b0; else a <= b; end �C�ϳ�Ӳ���·��D3.4��ʾ�� �D3.4 ͬ����(f��)λ�· �ڴˣ��҂���ӑՓͬ����(f��)λ�������YԴ��(w��n)�}��ֻӑՓͬ����(f��)λ�ā���(w��n)�B(t��i)�a(ch��n)����r�� ��(d��ng)ݔ���Din����ƽ�����ҏ�(f��)λ��̖(h��o)�ij��N(xi��o)�r(sh��)�g��clk��Tsu��Th��(n��i)�r(sh��)����(w��n)�B(t��i)���S֮�a(ch��n)���ˡ���D3.5�r(sh��)����ʾ����(d��ng)��(f��)λ���N(xi��o)�r(sh��)�g��clk��Tsu��Th��(n��i)��ݔ�딵(sh��)��(j��)�顰1����ͨ�^(gu��)��ݔ�딵(sh��)��(j��)���c��Ĕ�(sh��)��(j��)Ҳ��clk��Tsu��Th��(n��i)����ˣ���(sh��)�ؕ�(hu��)����(l��i)�Ʈ�����̖(h��o)�ɼ��ā���(w��n)�B(t��i)��r�� �D3.5 ͬ����(f��)λ�·�r(sh��)��D 2.3 ����(w��n)�B(t��i)�a(ch��n)�������Լ���?d��ng)_���� �ڌ�(sh��)�H��FPGA�·�O(sh��)Ӌ(j��)�У������˂��������ô�p�ف���(w��n)�B(t��i)��(du��)ϵ�y(t��ng)��Ӱ푣��������˿��]��ô���ܜp�ف���(w��n)�B(t��i)�l(f��)�����ʣ��Լ�����(w��n)�B(t��i)��?d��ng)_�ĸ��ʆ�(w��n)�}�� 2.3.1 ����(w��n)�B(t��i)�l(f��)������ �����������֪��ϵ�y(t��ng)����(w��n)�B(t��i)�l(f��)���Ķ�������clk��Tsu��Th���M(m��n)�㣬�ֻ����Ǐ�(f��)λ��̖(h��o)���Ƴ��ͻ֏�(f��)�r(sh��)�g���M(m��n)�㡣����FPGA������Tsu+Th�s����1ns����(f��)λ�Ƴ��ͻ֏�(f��)�r(sh��)�g��Ӽs����1ns�� ��(d��ng)������̖(h��o)����һ�M��(sh��)��(j��)��������̖(h��o)���^�٣��Ǿ���Ҫ��(du��)������̖(h��o)�M(j��n)��ͬ��̎�������猦(du��)һ��(g��)�����}�_��̖(h��o)�M(j��n)�вɼ���ֻҪ�}�_��̖(h��o)׃���l(f��)���ڕr(sh��)�Tsu��Th���ڃ�(n��i)���Ǿͺܿ��ܕ�(hu��)�a(ch��n)������(w��n)�B(t��i)������(w��n)�B(t��i)�a(ch��n)���ĸ��ʴ�Ş飺 ���� = �������r(sh��)�g + ���֕r(sh��)�g��/ �ɼ��r(sh��)����� ����ʽ3-1�� �ɹ�ʽ3-1���Կ������S��clk�l�ʵ����ӣ�����(w��n)�B(t��i)�l(f��)���Ď��������ӵġ� ���磬��ϵ�y(t��ng)����100M�r(sh��)犌�(du��)һ��(g��)�ⲿ��̖(h��o)�M(j��n)�вɼ����ɼ��r(sh��)����ڞ�10ns���Dzɼ��a(ch��n)������(w��n)�B(t��i)�ĸ��ʞ飺1ns/10ns = 10% ͬ������300M�r(sh��)犌�(du��)һ��(g��)�ⲿ��̖(h��o)�M(j��n)�вɼ����Ǯa(ch��n)������(w��n)�B(t��i)�ĸ��ʞ飺1ns/3.3ns = 30% �������������λ���120��ĕr(sh��)犌�(du��)һ��(g��)�ⲿ��̖(h��o)�M(j��n)�вɼ����Ǯa(ch��n)������(w��n)�B(t��i)�ĸ��ʽӽ�90% �����ڮ�����̖(h��o)�ɼ��^(gu��)���У�Ҫ��p�ف���(w��n)�B(t��i)�l(f��)���ĸ��ʣ� ��1�� ����ϵ�y(t��ng)�����r(sh��)犣�����ϵ�y(t��ng)���ڣ�����(w��n)�B(t��i)���ʾ͕�(hu��)�pС�� ��2�� ���ù�ˇ���õ�FPGA��Ҳ����Tsu��Th�r(sh��)�g�^С��FPGA������ 2.3.2 ����(w��n)�B(t��i)�Ĵ�?d��ng)_���� ʹ�î�����̖(h��o)�M(j��n)��ʹ�õĕr(sh��)�õ��O(sh��)Ӌ(j��)����(hu��)��(du��)������̖(h��o)�M(j��n)��ͬ��̎����ͬ��һ����ö༉(j��)D�|�l(f��)����(j��)(li��n)̎������D3.6��ʾ����������(j��)D�|�l(f��)����(du��)������̖(h��o)�M(j��n)��ͬ��̎���� �D3.6 ����(j��)�Ĵ���ͬ�� �@�Nģ�ʹ��Y�϶��f(shu��)���ǵ�һ��(j��)�Ĵ����a(ch��n)������(w��n)�B(t��i)�ڶ���(j��)�Ĵ�����(w��n)��ݔ�����ʞ�90%�������O�Ĵ�����(w��n)��ݔ���ĸ��ʞ�99%���������(w��n)�B(t��i)���S�·һֱ���f��ȥ���Ǿ͕�(hu��)���������o(h��)�����^����ϵ�y(t��ng)ֱ�ӱ���������(l��i)�҂������@�N��?d��ng)_�ĸ��ʆ�(w��n)�}�� ��D3.7��ʾ��һ��(g��)������һ��(j��)�Ĵ����l(f��)���ˁ���(w��n)�B(t��i)���ڶ���(j��)�������O�Ĵ�����������(w��n)�B(t��i)�r(sh��)��ģ�͡�
�D3.7 ����(j��)�Ĵ�����������(w��n)�B(t��i) ���ψD���Կ�������(d��ng)?sh��)�һ��(g��)�Ĵ����l(f��)������(w��n)�B(t��i)��(j��ng)�^(gu��)Tmet����ʎ��(w��n)���ڶ���(j��)�Ĵ����ܲɼ���һ��(g��)��(w��n)����ֵ�����Ǟ�ʲô�ڶ���(j��)�Ĵ���߀�ǿ��ܕ�(hu��)�a(ch��n)������(w��n)�B(t��i)�أ� ������ʎ�r(sh��)�gTmet���ܵ��ܶ�����Ӱ푵ģ�����Tmet�r(sh��)�g���L(zh��ng)�ж̣����Ԯ�(d��ng)Tmet�r(sh��)�g�L(zh��ng)������һ��(g��)�ɼ����ں��ǵڶ���(j��)�Ĵ����͕�(hu��)�ɼ�������(w��n)�B(t��i)����D3.8��ʾ��
�D3.8 ����(j��)�Ĵ�������(w��n)�B(t��i) ���ψD��֪���ڶ���(j��)Ҳ��һ��(g��)����(w��n)�B(t��i)���������@�N��r�£�����(w��n)�B(t��i)�a(ch��n)���˴�?d��ng)_���ĵ�һ��(j��)�Ĵ��������˵ڶ���(j��)�Ĵ�����ͬ��Ҳ���ĵڶ���(j��)�Ĵ�����?d��ng)_��������(j��)�Ĵ������@�ӕ�(hu��)�O(sh��)Ӌ(j��)߉�Д���e(cu��)���a(ch��n)������(w��n)�B(t��i)��ݔ�����܌�(d��o)��ϵ�y(t��ng)���C(j��)������ 2.3.3 ����(w��n)�B(t��i)��ʎ�r(sh��)�gTmet ����(w��n)�B(t��i)��ʎ�r(sh��)�gTmet�P(gu��n)ϵ����(j��)�Ĵ����IJɼ���(w��n)����(w��n)�}��TmetӰ����ذ��������������a(ch��n)��ˇ���ضȡ��h(hu��n)���Լ��Ĵ����ɼ�������(w��n)�B(t��i)�x��(w��n)���B(t��i)�ĕr(sh��)�̵ȡ�����ijЩ�ض��l������ɔ_��ݗ��ȶ���(hu��)���Tmet���L(zh��ng)�� 3. ��(y��ng)�÷����Ё���(w��n)�B(t��i)�a(ch��n)�����҂���Ҫ��(du��)����(w��n)�B(t��i)�M(j��n)�����������Ì�(du��)����(w��n)�B(t��i)���������N��ʽ�� ��1�� ��(du��)������̖(h��o)�M(j��n)��ͬ��̎���� ��2�� ����FIFO��(du��)��r(sh��)���(sh��)��(j��)ͨ���M(j��n)�о��_�O(sh��)Ӌ(j��)�� ��3�� ��(du��)��(f��)λ�·���î�����(f��)λ��ͬ��ጷŷ�ʽ̎���� 3.1.1 ��(du��)������̖(h��o)�M(j��n)��ͬ����ȡ߅���ڮ���ͨ�Ż��߿�r(sh��)���ͨ���^(gu��)���У���õľ��nj�(du��)������̖(h��o)�M(j��n)��ͬ����ȡ߅��̎������(du��)һ��(g��)������̖(h��o)�M(j��n)����ȡ������ͨ�����ó������ 4.1��ʾ�� ������� 4.1 �p�O�Ĵ�����ȡ߅�� input sig_nsyn; wire sig_nsyn_p; reg[1:0] sig_nsyn_r; always @(posedge clk or negedge rst_n) begin if(!rst_n) sig_nsyn_r <= 2��d0; else sig_nsyn_r <= { sig_nsyn_r [0], sig_nsyn }; end
assign sig_nsyn_p = sig_nsyn_r[0] & ~sig_nsyn_r[1]; �@�N߅����ȡ��ʽ��(du��)��һ��(g��)��(w��n)����ϵ�y(t��ng)�Dz����m�ģ����磺��(d��ng)?sh��)�һ�?j��)�Ĵ����ɼ�������(w��n)�B(t��i)���DŽ�(sh��)�����sig_nsyn_pݔ������(w��n)�B(t��i)���@�Ӿ͕�(hu��)��(du��)����sig_nsyn_p����̖(h��o)�M(j��n)���Д���·���Ӱ푣������Д���e(cu��)�`��ֵ�� ����(j��)3.3.1С��(ji��)�ā���(w��n)�B(t��i)�a(ch��n)�����ʣ������100M�r(sh��)�N���ǵ�һ��(j��)�Ĵ����a(ch��n)������(w��n)�B(t��i)�ĸ��ʼs��10%���S��ϵ�y(t��ng)�ɼ��l�����ߣ��Ǯa(ch��n)������(w��n)�B(t��i)�ĸ���Ҳ��(hu��)�S֮��������ˣ����M(j��n)�Ю�����̖(h��o)���l��ȡ߅�ؕr(sh��)��һ����ö��M(j��n)��һ��(j��)�Ĵ�����������(w��n)�B(t��i)��������ϵ�y(t��ng)��(w��n)����Ҫ��ߵ���r�£����ø��༉(j��)�Ĵ�����(l��i)��������(w��n)�B(t��i)���������� 4.2��ʾ���������4��(j��)�Ĵ�����������(w��n)�B(t��i)������(y��ng)��߅����̖(h��o)�a(ch��n)���ĕr(sh��)�g�����˃ɂ�(g��)�r(sh��)����ڡ� ������� 4.2 �༉(j��)�Ĵ�����ȡ߅����̖(h��o) input sig_nsyn; wire sig_nsyn_p; reg[3:0] sig_nsyn_r; always @(posedge clk or negedge rst_n) begin if(!rst_n) sig_nsyn_r <= 2��d0; else sig_nsyn_r <= { sig_nsyn_r [2::0], sig_nsyn }; end
assign sig_nsyn_p = sig_nsyn_r[2] & ~sig_nsyn_r[3]; 3.1.2 FIFO�M(j��n)�Ю������l��(sh��)��(j��)̎����(d��ng)��(sh��)��(j��)����һ��(g��)�r(sh��)�����һ��(g��)�r(sh��)���ĕr(sh��)�^�����(sh��)��r�¶�����FIFO��(l��i)�������g���_�������p�r(sh��)犌�(du��)��(sh��)��(j��)���_���Ϳ��Ա��⁆��(w��n)�B(t��i)�İl(f��)���� 3.1.3 ������(f��)λ��ͬ��ጷ���(du��)�ڏ�(f��)λ��r�µā���(w��n)�B(t��i)�����������ڻ֏�(f��)�r(sh��)�g���Ƴ��r(sh��)犲��M(m��n)����ɵģ���ˣ���õ�̎����ʽ�Dz��î�����(f��)λ��ͬ��ጷš������·ģ������ʾ�����õڶ���(j��)�Ĵ���ݔ������ȫ�֏�(f��)λ��̖(h��o)ݔ���� ������� 4.3 ������(f��)λ̎�� wire sys_rst_n; reg [1:0] rst_r; always @(posedge clk or negedge rst_n) begin if(!rst_n) rst_r <= 2��d0; else rst_r <= {rst_r[0], 1��b1}; end assign sys_rst_n = rst_r[1]; ͨ�^(gu��)�������N��ʽ̎��������̖(h��o)��������(sh��)��(j��)���Լ�������(f��)λ����Ч�����ϵ�y(t��ng)�ķ�(w��n)���ԡ��p�ف���(w��n)�B(t��i)�Įa(ch��n)����
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��