|
|
��܇��܇��ʹ�õĵ�܇?y��n)��_(d��)��ײ��(b��o)��ϵ�y(t��ng)�����Q�ĵ�܇?y��n)��_(d��)������܇��܇�r(sh��)��������܇?y��n)ײ��ó����y(c��)��ԭ��̽�y(c��)��܇β���x�ϵK��ľ��x,����܇��܇�o���b�á���܇�r(sh��)����(d��ng)��܇β��̽�y(c��)���ϵK��r(sh��)����܇?y��n)��_(d��)�͌�(sh��)�r(sh��)��(d��ng)�B(t��i)�@ʾ�x�ϵK��ľ��x���_(d��)���O(sh��)���İ�ȫ����ֵ�r(sh��)����܇?y��n)��_(d��)�����l(f��)����(b��o)�����Ծ�ʾ�{�T���o���{�T��ȫ��܇���F(xi��n)�ڴ����(sh��)�������е�܇?y��n)��_(d��)����܇?y��n)��_(d��)�·�N��^�࣬���Ľ�B���چ�Ƭ�C(j��)���Ƶĵ�܇?y��n)��_(d��)ϵ�y(t��ng)��ԓϵ�y(t��ng)����ͨ���͆�Ƭ�C(j��)��������·������ϵ�y(t��ng)���ܔU(ku��)չ��ϵ�y(t��ng)�·��Ҫ���ü���������(g��u)�ɣ����Ԫ���٣��·��(ji��n)�����{(di��o)ԇ���㡢�ɱ��ͣ�������Ʒ�����a(ch��n)��
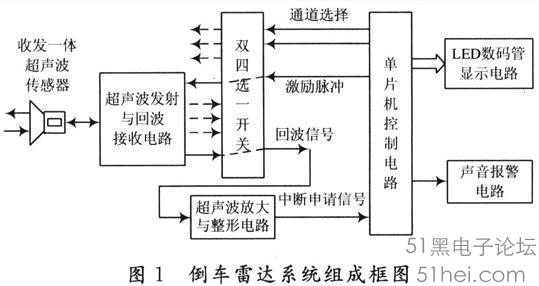
1������܇?y��n)�ϵ�y(t��ng)�M�ɼ�����ԭ��������܇��ײ�A(y��)��ϵ�y(t��ng)����·�հl(f��)һ�w���](��ˮ)�ͳ������������䳬���l(f��)���c�ز������·���������̖(h��o)�Ŵ��·����Ƭ�C(j��)�����·��LED��(sh��)�a���@ʾ�·�ͷ��Q�����(b��o)���·�M�ɡ�ϵ�y(t��ng)�M�ɿ�D��D1��ʾ��
��(d��ng)��܇��܇�r(sh��)�ɵ�܇�Q���b���Ԅ�(d��ng)��ͨ������܇?y��n)�ϵ�y(t��ng)�Դ��ϵ�y(t��ng)��늏�(f��)λ���M(j��n)�빤����B(t��i)����Ƭ�C(j��)���̮a(ch��n)��һ��40kHz�ľ����}�_늉�����(j��ng)���xһģ�M�_�P(gu��n)�ӵ������l(f��)���c�ز������·����(j��ng)�Ŵ��(q��)��(d��ng)�����������l(f��)���������ͬ�r(sh��)��Ƭ�C(j��)�_ʼӋ(j��)�r(sh��)���l(f��)����ij��������ϵK����γɷ��䲨�����ַ��䲨���������ڳ�������������(j��ng)����������������D(zhu��n)�Q��׃���������̖(h��o)��ԓ�������̖(h��o)��(j��ng)�Ŵ����ήa(ch��n)��ؓ(f��)��׃늉������Ƭ�C(j��)�l(f��)���Д���Ո(q��ng)����Ƭ�C(j��)�յ��Д���Ո(q��ng)����̖(h��o)������푑�(y��ng)�Д࣬��(zh��)���ⲿ�Д����(w��)����ֹͣӋ(j��)�r(sh��)���õ������l(f��)�ͺͷ��صĕr(sh��)�gT��Ӌ(j��)����l(f��)���c(di��n)�x�ϵK��ľ��xS������S=(C��T)��2��C�dz����ڿ՚��еĂ����ٶȣ��ڳ���25��r(sh��)��C�s��346m��s�����l(f��)����ij����ڜy(c��)�����(n��i)δ�����ϵK�ֱ����Ƭ�C(j��)���r(sh��)�Д�a(ch��n)������(zh��)�ж��r(sh��)�Д����(w��)�����x����һ·�����ΰ�����·��������·��������·������·������^�m(x��)�l(f��)��ͽ��ճ���������(j��ng)�^Ӌ(j��)��̎������·̽�y(c��)̎���ꮅ���x����·�Мy(c��)������С���xֵͨ�^LED��(sh��)�a���@ʾ��������(d��ng)��С���xֵС���A(y��)���O(sh��)���Ĉ�(b��o)�����x�r(sh��)����Ƭ�C(j��)��ͨ���Q�����Դ�����Q���l(f��)����(b��o)��������·̽�y(c��)�o�ز��Д���Ո(q��ng)���t�@ʾ��-��--���������ڰ�ȫ���x��(n��i)�]���ϵK����^�m(x��)��һ݆��ѭ�h(hu��n)̽�y(c��)̎����
2������܇?y��n)�ϵ�y(t��ng)Ӳ���·���O(sh��)Ӌ(j��)
2.1�����l(f��)���c�ز������·
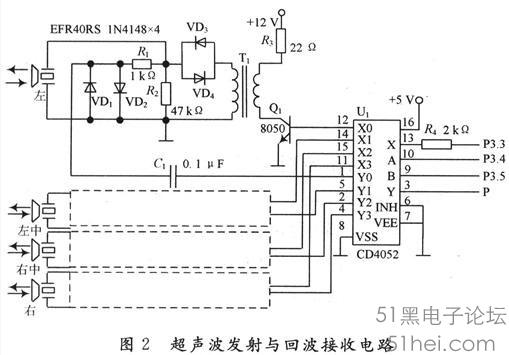
�����l(f��)���c�ز������·����Ҫ����������(q��)��(d��ng)�������������}�_늉���ֵ����Ч���M(j��n)��늣��D(zhu��n)�Q���������İl(f��)����x����ͨ�^�հl(f��)һ�w�ij��������������صij����D(zhu��n)׃���������̖(h��o)�������l(f��)���c�ز������·��D2��ʾ(����һ·��������·�cԓ·һ��)��
EFR40RS���հl(f��)һ�w���](��ˮ)�ͳ������������������l��f0=(40��0��1��0)kHz��-3 dB����1kHz���(q��)��(d��ng)늉���һ��ֵҪ��60��150V��CD4052���p·���xһģ�M�_�P(gu��n)����Ƭ�C(j��)��P3��4��P3��5�˿�ݔ���xͨ��̖(h��o)����Ƭ�C(j��)��P3��3�˿�ݔ��һ��40kHz���}�_늉���ͨ�^CD4052��X·�ӵ��xͨ���_�P(gu��n)���O��Q1���O����(j��ng)�}�_׃����T1������100VP-P���ң��(q��)��(d��ng)����������EFR40RS�l(f��)�䳬�����l(f��)��r(sh��)���}�_늉���ֵ��Сֱ��Ӱ표y(c��)����h(yu��n)������(y��ng)���ó������õ��}�_׃����������صij�����(j��ng)ԭ�հl(f��)һ�w���]�ͳ���������׃�ɺ�����(j��)��һ���}�_���̖(h��o)�����ڻز����̖(h��o)�ķ�ֵС��VD3��VD4���O�ܽ�ֹ��ԓ��̖(h��o)����(hu��)ͨ�^T1׃������߅��Ȧ�γɶ�·��VD1��VD2���O��Ҳ��ֹ�����Իز����̖(h��o)��(j��ng)R1��C1��ͨ�^CD4052��Y·�͵��������̖(h��o)�Ŵ��c�����·��R1��VD1��VD2�M���p�����·������l(f��)��r(sh��)�Ĵ���̖(h��o)��ɳ����Ŵ��c�����·�����������p���·��
2��2�������̖(h��o)�Ŵ��·
�������̖(h��o)�Ŵ��·���ü����·CX20106A��(g��u)�ɡ�CX20106A���ձ����ṫ˾���a(ch��n)�ļt���b����̖(h��o)���ռ����·��ͨ�^�ⲿ������裬�����(n��i)����ͨ�V���·�������l��f0�O(sh��)�Þ�40kHz���Ϳ��Խ��շŴ������̖(h��o)��������ݔ��ؓ(f��)�}�_늉���
�����y(c��)����(y��ng)���·�D��D3��ʾ��1�_�dz������̖(h��o)ݔ��ˣ�2�_�c��֮�g�B��RC��(li��n)�W(w��ng)�j(lu��)���ǃ�(n��i)��ǰ�÷Ŵ��·ؓ(f��)�����W(w��ng)�j(lu��)�ĽM�ɲ��֡����R5�Ĕ�(sh��)ֵ�_��ǰ�÷Ŵ��·�����档R5���ֵ�pС��ؓ(f��)�����p�����Ŵ�(sh��)����֮���t�Ŵ�(sh��)�pС��3�_�c��֮�g�B�әz�����C3���m��(d��ng)��׃���C3�Ĵ�С�����Ը�׃�������̖(h��o)�Ŵ�������·���`���ȺͿ��ɔ_������C3��������`���ȵͣ����ɔ_������(qi��ng)��C3����С���`���ȸߣ����ɔ_��������������`��(d��ng)����5�_�c�Դ�g����һ��(g��)��裬�����O(sh��)�Ã�(n��i)����ͨ�V���·�������l��f0��
��(d��ng)R6=200 k���r(sh��)��f0=40 kHz��6�_�c��֮�g��һ��(g��)�e����ݣ���(bi��o)��(zh��n)ֵ��330pF�����ԓ���ֵȡ��̫��(hu��)ʹ̽�y(c��)���x׃�̡�7�_���·��늘O�_·ݔ���ˣ�R7��ԓ���_��������衣�����·CX20106A�o��̖(h��o)ݔ��r(sh��)��7�_ݔ�����ƽ����(d��ng)ݔ��ij������̖(h��o)��(j��ng)�Ŵ����κ�7�_ݔ��һ��(g��)ؓ(f��)�}�_늉���
2.3��Ƭ�C(j��)�����·���@ʾ����(b��o)���·
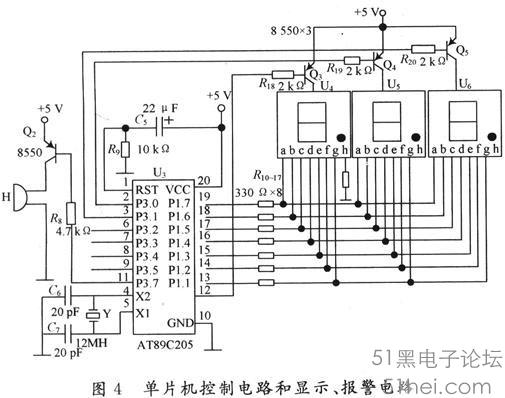
�·�D��D4��ʾ������ϵ�y(t��ng)�õ���Ƭ�C(j��)��ݔ�룯ݔ���˿ڲ��࣬�ڲ����]���ܔU(ku��)չ�r(sh��)���Ĺ��܉��ú͵ͳɱ��ĽǶȿ��]������AT89C2051��Ƭ�C(j��)��������·�ĺ���������AT89C2051��Ƭ�C(j��)����20��(g��)���_��������15��(g��)I��O�˿�(P3��6�o�����_)���ɂ�(g��)16λ���r(sh��)����Ӌ(j��)��(sh��)�������w�eС���r(ji��)��͡�����12MHz�߾��ȵľ����ԫ@���^��(w��n)���ĕr(sh��)��l�ʣ��pС�y(c��)���`���Ƭ�C(j��)��P3��3�˿������Ե�ݔ��һ��40kHz�ľ����}�_��ͨ�^�p·���xһģ�M�_�P(gu��n)CD4052�����Եؼӵ���·�����l(f��)���c�ز������·����Ƭ�C(j��)��P3��4��P3��5�˿�ݔ���p·���xһģ�M�_�P(gu��n)CD4052���xͨ��̖(h��o)����Ƭ�C(j��)��P3��2�˿ڞ��ⲿ�Д�0�Д���Ո(q��ng)��̖(h��o)ݔ��ˡ���λLED��(sh��)�a�ܲ��Ä�(d��ng)�B(t��i)�����@ʾ��U4��С��(sh��)�c(di��n)������U4�Ć�λ��m��U5�Ć�λ��dm��U6�Ć�λ��cm��������Դ���Q�������(b��o)���l(f��)��������һ�������ɱ��ͣ����DZ��ڄ�(d��ng)�B(t��i)�����@ʾ��ܛ�����̡�
3ϵ�y(t��ng)ܛ�����O(sh��)Ӌ(j��)
ϵ�y(t��ng)ܛ������ģ�K���O(sh��)Ӌ(j��)������U(ku��)չ��ֲ�����ÅR���Z�Ծ��̡���Ҫ��������T0�Д����(w��)�����ⲿ�Д�0����(w��)�������l(f��)���ӳ���
3.1������
��ϵ�y(t��ng)����·�y(c��)��ͨ�������÷֕r(sh��)������������һ������һ������һ�������ѭ�h(hu��n)�y(c��)�ࡣÿһ·�l(f��)�䳬����ĵȴ��ⲿ�Д��r(sh��)�g��(y��ng)���ڳ����������Ч̽�y(c��)���x��(n��i)�����r(sh��)�g�����������Ч̽�y(c��)���x���Թ������̵�ѭ�h(hu��n)�g���r(sh��)�g����?y��n)鳬���ڿ՚��Ђ��������?hu��)����˥�p�����Գ����y(c��)����������Ч̽�y(c��)���x���@�����Ч̽�y(c��)���x�c��N��(sh��)���P(gu��n)��
�c�������������ܵĺÉġ��c�(q��)��(d��ng)�������������}�_늉���ֵ(����)�Ĵ�С���ϵK���С���Π�ϵK�����������Լ����䲨�c���䲨֮�g�ĊA�ǡ��c�����Ŵ�������·���`���ȵ����P(gu��n)���O(sh��)�������Ч̽�y(c��)���x��8m(�հl(f��)һ�w���]�ͳ������������^�y�_(d��)������(sh��)�H��Ҳ�]�б�Ҫ̽�y(c��)���h(yu��n)���ϵK�ֻ���O(sh��)Ӌ(j��)����ԣ���������@ʾλ��(sh��)���ޣ�Ҳ��회�(du��)���̽�y(c��)���x������)���tѭ�h(hu��n)�������g���r(sh��)�gTm=2S��C=2��8��346ms�����ϱ�����ճ���������������ӕr(sh��)�ͳ����(zh��)�Еr(sh��)�g������ԣ�����O(sh��)��Tm��56 ms��
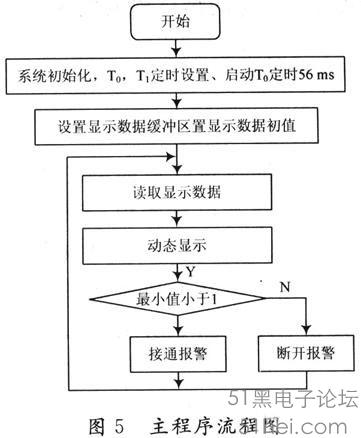
���������̈D��D5��ʾ�������nj�(du��)ϵ�y(t��ng)��ʼ�����˿�p1��0��P3��3��0���O(sh��)�öї����Д����S������λEA���S�Д�(EA=1)�����S�ⲿ�Д�0�Д�(EX0=1)������߅���|�l(f��)��ʽ(IT0=1)���O(sh��)�ö��r(sh��)��T0���S�Д�(ET0=1)����16λ������ʽ���r(sh��)�s56ms���O(sh��)�ö��r(sh��)��T1��16λ������ʽ���r(sh��)��Ӌ(j��)��(sh��)��Ӌ(j��)��(sh��)��ֵ0000H��Ȼ��(d��ng)T0���r(sh��)���O(sh��)���@ʾ��(sh��)��(j��)��ֵ����λBCD�a999(cm)����(du��)��(y��ng)���ζδa�@ʾ��---������·̽�y(c��)̎���ꮅ���ĽM��(sh��)��(j��)�е���Сֵ�����@ʾ���_�^(q��)��ͨ�^LED��(sh��)�a���@ʾ��ͬ�r(sh��)ԓֵ�c�O(sh��)����100cmֵ���^�����ĽM��(sh��)��(j��)�е���СֵС��100 ��P3��7�˿���0��Q2���O�܌�(d��o)ͨ����Դ���Q����늰l(f��)����(b��o)����
���چ�Ƭ�C(j��)����12MHz�ľ���1��(g��)�C(j��)�����ڞ�1��s������Ӌ(j��)��(sh��)��ÿӋ(j��)һ��(g��)��(sh��)����1��s�����r(sh��)��T1����ģʽ�O(sh��)�Þ�16λ���r(sh��)��Ӌ(j��)��(sh��)��ģʽ���t����r(sh��)65��536ms�����ڶ��r(sh��)��T0ÿ56ms�a(ch��n)���Д࣬��(zh��)��T0�Д����(w��)����r(sh��)ֹͣT1Ӌ(j��)�r(sh��)������T1Ӌ(j��)�r(sh��)����(hu��)�a(ch��n)������Дࡣһ݆��·̽�y(c��)̎���ꮅ���Õr(sh��)�g��s��56ms��4=224 ms���Õr(sh��)�̣ܶ�����܇�ٶ��ֱ��^�������Կ���������(sh��)�r(sh��)��(d��ng)�B(t��i)�@ʾ��
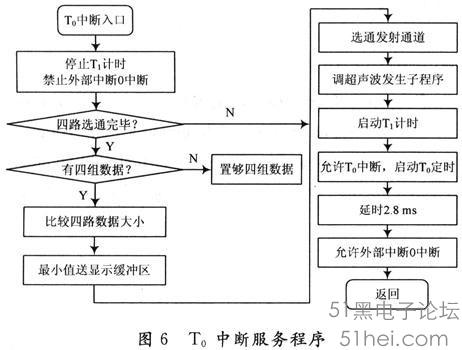
3.2T0�����(w��)����
T0�Д����(w��)�������̈D��D6��ʾ��ÿ��56ms�քe������������С������С���������xͨ��һ·�����l(f��)���c�ز������·���{(di��o)�ó����l(f��)���ӳ����ͳ�10kHz�ij����}�_늉������r(sh��)��T1�_ʼӋ(j��)�r(sh��)�����r(sh��)��T0�_ʼ���r(sh��)56 ms��ʹÿ·����56 ms��
���˱�����յ����������������ֱ�䲨�a(ch��n)�����Д���Ո(q��ng)���ӕr(sh��)2��8ms�����S�ⲿ�Д�0�Д࣬�ȴ����շ��صij�����̖(h��o)�����ԣ���С̽�y(c��)���x(ä�^(q��))Smin=Ct��2=346��0��0028��2��0��48m����·̽�y(c��)̎���ꮅ������·����Сֵ�����@ʾ���_�^(q��)��������·̽�y(c��)����Щ·����Ч̽�y(c��)������(n��i)�l(f��)��ij���δ���ϵK��o���ز����ⲿ�Д�0���a(ch��n)���Д���Ո(q��ng)��̖(h��o)���������M(j��n)��̽�y(c��)ä�^(q��)���ⲿ�Д�0�a(ch��n)�����Д���Ո(q��ng)�����������t���r(sh��)��T1Ӌ(j��)�r(sh��)�����r(sh��)��T0�a(ch��n)���Д࣬��T0�Д����(w��)�����У�����λBCD�a999(��λʮ�M(j��n)�Ɣ�(sh��)���ֵ999cm)�É��ĽM��(sh��)��(j��)�����@ʾ���_�^(q��)���ĽM��(sh��)��(j��)����999�r(sh��)���t��(du��)��(y��ng)���ζδa�@ʾ��---������܇��ʼ��LED��(sh��)�a�@ʾ�����@ʾ��-��--���������ڰ�ȫ���x��(n��i)�]���ϵK����l(f��)����(b��o)�������@ʾ��-��--���������M(j��n)����̽�y(c��)ä�^(q��)��
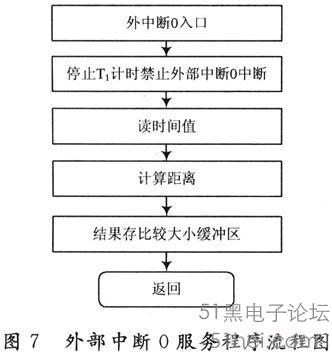
3.3�ⲿ�Д�0����(w��)����
�ⲿ�Д�O����(w��)�������̈D��D7��ʾ����Ƭ�C(j��)һ�����յ����س�����̖(h��o)(��INT0���_�ɸ��ƽ��׃?y��u)����?�������M(j��n)���ⲿ�Д�0����(w��)��������ֹͣ���r(sh��)��T1Ӌ(j��)�r(sh��)����ֹ�ⲿ�Д�0�ДࡣȻ���r(sh��)��T1�еĔ�(sh��)N��Ҳ���������������õĕr(sh��)�gN(��λ����s)����ʽS=CT��2=(346x N��10-6)��2=173��N��10000Ӌ(j��)�㣬���ñ��y(c��)��ľ��x(��λ��cm)����Ӌ(j��)��Y(ji��)����λʮλ����(g��)λBCD�a��ʽ������^��С�ľ��_�^(q��)���Ԃ���^��Сʹ�á�Ȼ��ȴ����r(sh��)��T0���r(sh��)56ms�Д�Įa(ch��n)�����^�m(x��)��һ·��̽�y(c��)̎����
3.4�����l(f��)���ӳ���
�����l(f��)���ӳ���ͨ�^P3��3�˿ڰl(f��)��16��(g��)������25��s(���l��40 kHz��1��(g��)���ڃ�(n��i)���ƽ���m(x��)13��s�����ƽ���m(x��)12��s)�ľ����}�_늉����}�_����(g��)��(sh��)��10��20��(g��)���^���m���}�_��(g��)��(sh��)̫�٣��l(f��)�䏊(qi��ng)��С��̽�y(c��)���x�̣��}�_��(g��)��(sh��)̫�࣬�l(f��)����m(x��)�r(sh��)�g�L(zh��ng)�����x�ϵK����x���r(sh��)���}�_����δ�l(f��)���ꮅ���Ȱl(f��)���ȥ���}�_�a(ch��n)���Ļز��͵��_(d��)���նˣ�Ӱ표y(c��)��Y(ji��)������ɜy(c��)��ä�^(q��)����
4��(sh��)�F(xi��n)��(y��ng)�÷���
��ϵ�y(t��ng)�ڌ�(sh��)�(y��n)�җl�����M(j��n)���˿����Ե��о��O(sh��)Ӌ(j��)��Ҫ��(sh��)�H��(y��ng)���оͱ�횿��]�y(c��)�����Ⱥ�����(w��n)���ԵĆ��}����ˣ���ϵ�y(t��ng)�ɲ�ȡ���(xi��ng)��ʩ����ߜy(c��)�����Ⱥ�����(w��n)���ԡ�
(1)�����Ă����ٶ��c�ض����P(gu��n)�������m��(y��ng)��ͬ�h(hu��n)���ض��µĜy(c��)����Ҫ����ߜy(c��)�����ȣ�Ӳ���·�Ͽ����әz�y(c��)܇��h(hu��n)���ضȵĭh(hu��n)��(ji��)����Ƭ�C(j��)����(j��)��(sh��)�y(c��)�Ĝض�ֵ����Ӌ(j��)��_�������Ă����ٶȣ���C=331��4+0��6lt��t�ǭh(hu��n)���ضȡ������ڲ�����Ӳ���ɱ���r�£��ɿ��]ͨ�^��(sh��)�(y��n)��(sh��)��(j��)�������ҵ��y(c��)��ֵ�c��(sh��)�Hֵƫ�����c(di��n)��Ҏ(gu��)�ɣ�ͨ�^ܛ�����̌�(du��)�y(c��)����(sh��)��(j��)�M(j��n)��У��̎����
(2)ܛ���O(sh��)Ӌ(j��)�в��Ô�(sh��)�֞V���е����g(sh��)ƽ���V������?q��)�ÿ��(g��)�y(c��)���c(di��n)�M(j��n)���B�m(x��)��Μy(c��)����ȡƽ��ֵ����ԓ�y(c��)���c(di��n)�Ĝy(c��)����(sh��)��(j��)������ߔ�(sh��)��(j��)�ɘӵĿɿ��ԡ�Ҫ�M���pС̽�y(c��)ä�^(q��)�����O(sh��)�����ӕr(sh��)�r(sh��)�g�ɸ���(j��)��(sh��)�H���ó�������������r(sh��)�g���������ڌ�(sh��)�H�{(di��o)ԇ�д_����С�ӕr(sh��)�r(sh��)�g��
(3)��܇?y��n)��_(d��)���b��܇�ϣ���܇?y��n)��_(d��)�Ĺ����h(hu��n)���dz����ӣ���܇��܇�����r(sh��)���߉��c(di��n)��a(ch��n)����(qi��ng)��늴�ݗ�䣬��(hu��)Ӱ��·����������������Ӳ����ܛ������Ҫ���]��ȡ���ɔ_��ʩ�����ϵ�y(t��ng)�����Ŀɿ��ԡ����ý��ٚ������·���������ξ��B�ӳ������������ڝM��y(c��)�����x����r�£����m��(d��ng)�{(di��o)�������̖(h��o)�Ŵ�������·�Йz�����C3��������Ӳ���Ͽ����ӡ����T�����·��ܛ���O(sh��)Ӌ(j��)����ָ������ܛ�����塢���O(sh��)��ܛ�������T��������ֹ�������w�������M(j��n)����ѭ�h(hu��n)����(du��)���{�T���f����܇�r(sh��)��Ҫ�P(gu��n)�ĵ���܇���Пo�ϵK��Լ��ϵK���x܇��s�ж��h(yu��n)�Ȇ��}������܇���Ƅ�(d��ng)�r(sh��)���ڑT�ԣ���܇�����ϵK��r(sh��)���{�T��Ҫ��ǰ�Ƅ�(d��ng)�����]�ԃr(ji��)�ȣ���܇?y��n)��_(d��)�y(c��)�����Ȳ��غܸߡ����ĵ�܇��ȫ���]���˕r(sh��)�Ĝy(c��)���@ʾֵ������С��
5 �Y(ji��) �Z
��ϵ�y(t��ng)��������ˆ�Ƭ�C(j��)�ă�(n��i)���YԴ����ܛ�����̮a(ch��n)�����������}�_������Ӳ���ij����l(f��)���·����(ji��)ʡ��Ӳ���ɱ�������һ�K����������(sh��)�F(xi��n)�������շŴ�����Σ������˲��ö༉(j��)�����\(y��n)�ŽM�ɸ�����Ŵ��·�a(ch��n)���Լ��Ȇ��}����(sh��)�(y��n)�����O(sh��)Ӌ(j��)���С��ڲ�����Ӳ���ɱ��r(sh��)��ͨ�^����ܛ���O(sh��)Ӌ(j��)�������ϵ�y(t��ng)�y(c��)�����Ⱥ����Ŀɿ��ԣ��܉�M��ʹ��Ҫ���ڿ��]���ܔU(ku��)չ�r(sh��)�����Բ��Î������T������AT89S52��Ƭ�C(j��)�������ӔU(ku��)չ�˿ڡ��ڳ����y(c��)��Ļ��A(ch��)�ϣ�������ӷ��I��(b��o)�����ܡ�܇�d��늳�늉��z�y(c��)���ܵȣ��������͔z���^��С��Һ���@ʾ������ɞ��ֱ���^��܇�Ŀ�ҕ��܇?y��n)��_(d��)����ϵ�y(t��ng)��(sh��)���ԏ�(qi��ng)���ԃr(ji��)�ȸߡ�
|
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��