|
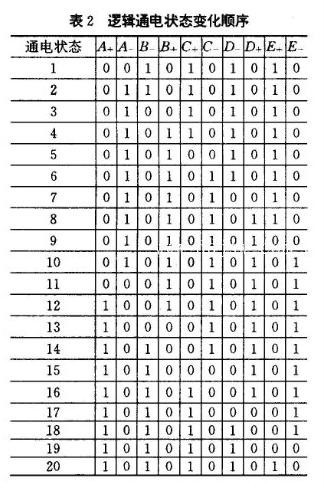
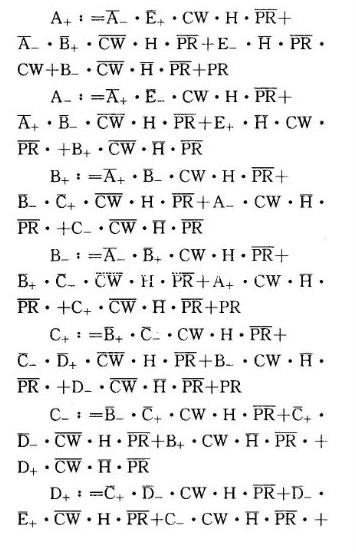
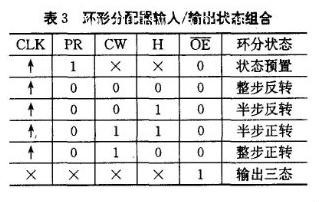
l引言 五相混合式步進電動機具有許多優良的性能,因此在國內外都得到了較大發展,其驅動技術也取得了很大進步[1]。由于五相混合式步進電動機系統的研制和開發歷史不長,電機驅動電源中的環形脈沖分配器專用芯片目前尚未見到,國內外廠家生產的五相混合式步進電動機驅動電源中的環形脈沖分配器大都是由數字邏輯集成電路或EPROM存貯器構成的[2.。由于電機的運行節拍和運行方式較多,采用這些方式設計的環形脈沖分配器結構復雜、功能較少、可靠性不高。近年來隨著邏輯可編程器件的出現,為邏輯電路的設計提供了極大的靈活性,因此完全可以用邏輯可編程器件(例如PAL、GAL等)設計步進電動機的環形脈沖分配器。本文給出由兩片GAL16V8構成的五相混合式步進電動機環形脈沖分配器的設計方法。 2五相混合式步進電動機的勵磁方式及環形脈沖分配邏輯 根據五相混合式步進電動機韻工作原理,可以得到如表1所示的勵磁方式。可見五相混合式步進電機的勵磁方式很多,但是運行節拍只有兩種即整步10拍和半步20拍。盡管該電機的勵磁方式很多,但從電機運行的平穩陛和獲得最大合成轉矩的角庋出發,表1五相混合式步進電動機的勵磁方式常采用4-4相通電方式作為整步運行方式,4-5相通電方式作為半步運行方式。整步運行方式中的5-5相通電方式雖較4-4相通電方式的合成轉矩大,但由于驅動電源中采用橋式電路時存在上下橋臂換向容易引起短路而較少采用。本文給出的是4-4相通電方式和5-5相通電方式的環形脈沖分配器設計方法。 根據五相混合式步進電動機的合成轉矩矢量圖[4],可以得到4-5相勵磁方式和4-4相勵磁方式下的邏輯通電狀態變化順序,如表2所示。與之對應的功放電路形式如圖1所示。表2中的“1”代表功率管導通,“0”代表功率管關斷。其中正轉的邏輯通電狀態變化順序為  . 表2中序號為奇數的邏輯通電狀態即為4-4相勵磁方式 3環形脈沖分配器的設計 通過分析可以看出,五相混合式步進電動機的環形脈沖分配器應有10個輸出端,控制相應的功率開關管導通或關斷,使得相應的繞組關斷、正向通電或反向通電。除此之外,該環形脈沖分配器還應有相應的輸入控制端,定義為: CLK-步進脈沖 CW-正轉(CW=1)或反轉(CW=O) H-半步運行(H=1)或整步運行(H=0) PR-初始狀態預置 OE-輸出使能 根據定義,通過對表2所示邏輯通電狀態的分析(并不需用多變量卡諾圖的繁雜化簡過程),便可以得到五相混合式步進電動機環形脈沖分配器的時序邏輯表達式: 由時序邏輯表達式,用GAL器件實現環形脈沖分配器的設計是不難的。目前通用的GAL器件(如GAL16V8、GAL20V8等)只有8個三態輸出端,由于五相混合式步進電動機共需要10個輸出端,所以可選用兩片GAL器件實現。由兩片GAL16V8構成的五相7昆合式步進電動機環形脈沖分配器如圖2(略)。圖中CLK和PR輸入端周邊電路是為實現輸出狀態自動預置而設計的。為了保證預置的可靠性,參數選擇必須滿足R2C2>R1C1的關系。當然也可以由外部電路實現狀態預置。根據圖2可以得到環形脈沖分配器的輸入/輸出狀態組合關系,如表3所示。 4結語 文中給出的用GAL器件設計五相混合式步進電動機環形脈沖分配器的方法,通過試驗驗證是可行的,所設計的環形脈沖分配器電路結構大為簡化,可靠性高。這種方法同樣可以實現其它相數的步進電動機環形脈沖分配器的設計。細分電路的環形脈沖分配器用這種方法設計也是可行的。
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

