1.設計內容
本設計主要是步進電機的控制電路。根據步進電機的工作原理,采用脈沖分配器和功率放大器使步進電機工作。
2.設計要求
a.步進電機能夠正反轉;
b步進電機進給速度可調,并能夠進行步進控制;
c步進電機的工作方式可調
3.方案的初步選定
數控自動進給的私服系統采用:功率步進電機作為伺服裝置;電子控制部分主要是實現對步進電機的控制(圖1)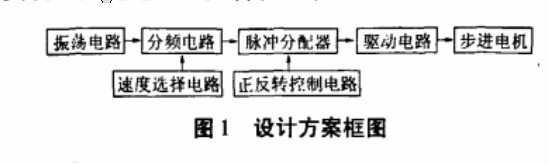
振蕩電路:產生具有一定頻率的連續脈沖信號;
分頻電路:對震蕩電路產生的連續信號,經分頻電路產生幾種不同頻率的脈沖信號,使步進電機獲得不同轉速;
脈沖分配器:將連續的脈沖信號按步進電機的工作方式分配成步進電機所需的脈沖信號;
驅動電路:將脈沖分配器的輸出信號進行功率放大,驅動步進電機工作;
速度控制電路:使步進電機獲得不同頻率的脈沖信號,從而獲得不同的速度;
步進電機工作方式和正反轉控制電路:根據步進電機不同的工作方式控制其正反轉
4系統硬件電路設計
4.1步進電機特點
步進電機作為自動控制領域的主要控制元件之一,具有以下特點:
a。在單片機應用系統中,它可以直接接受由計算機系統輸出的數字信號;
b。可方便地實現機械移位。例如,步進電機配合絲桿和齒輪可把角度變化為直線位移;
c,控制靈敏度高,快速啟動停止能力,可快讀啟停
d,速度變化不失步。一般不進點擊的速率為200-1000步/每秒,在速率變化時不會失步;
e,步距角變化大、精度高。在沒有齒輪減速的情況下,步距角范圍為90度-0.36度/步;
f,能精確返回原位。無論變阻式還是永磁式步進電機,都能精確地返回電機的起始位置;
g,控制脈沖與角位移能精確同步。在單片機控制應用系統中,可以利用電機控制脈沖與它的角位移精確同步的特點,實現對物理量的控制;
H控制方便,可靠,精確定位。例如在執行機構的控制中,步進電機可方便的帶動多圈電位器或者旋轉變壓器,以調節電壓或電流,實現對執行機構的控制。
4.1.2步進電機的類型及選擇
常用的步進電機有:反應式(VR),永磁式(PM),混合式(HB),單相式
步進電機
a永磁式步進電機一般為兩相,轉矩小,體積小,步進角一般為7.5度或者15度
b反應式一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但是噪聲和振動都很大。反應式步進電機轉子由軟磁材料組成,定子上有多相繞組,利用磁導的變化產生轉矩;
c混合式步進電機是指混合了永磁式和反應式的優點。他分為兩相和五相:兩相步進角為1。8度,五相一般為0.72度。其應用最廣泛。
4.1.3步進電機計算
兩相步進電機:
齒距角:Qz=2π/Z z為轉子齒數
步距角(轉子走一步所轉過的角度):Qn=q=Qz/N=2π/NZ N:步進電機工作拍數;
步進電機轉速:n=60xf/NxZ(轉/分) f-脈沖頻率(赫茲)
4.1.4步進電機的脈沖波形圖 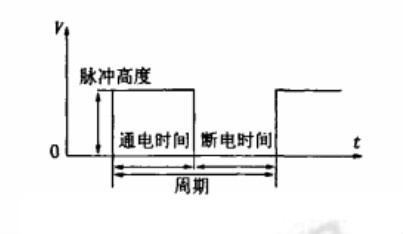
4.1.5兩相步進電機的三種工作方式;
步進電機有兩種工作方式:
單拍,通電順序:A-B-ˉA-ˉB
雙拍,通電順序:AB-BˉA-ˉAˉB-ˉBA
兩相八拍,通電順序:A-AB-B-BˉA-ˉA-ˉAˉB-ˉB-ˉBA
a.步進電機為兩相雙四拍運行狀態:當電機繞組通電順序為A-B-ˉA-ˉB為正轉;A
-ˉB-ˉA-B為反轉。當N=4,步距角=Qn=q=Qz/N=2π/NZ =18度,步進電機轉一圈所需的步進數為360度/18度=20(步進數)
b步進電機為兩相雙四拍運行狀態:當電機繞組的通電順序為AB-BˉA-ˉAˉB-ˉBA時為正轉;A/ˉB-/ˉB/ˉA-/ˉAB-BA為反轉。步距角及步進數計算同上
c步進電機為兩相八拍運行狀態:步進電機繞組通電順序為A-AB-B-BˉA-ˉA-ˉAˉB-ˉB-ˉBA為正轉,通電順序為A-AˉB-ˉB-ˉBˉA-ˉA-ˉAB-B-BA時為反轉。N=8時,步距角=Qn=q=Qz/N=2π/NZ=9度,則步進電機轉一圈所需步進數為360度/9度=40步進數。
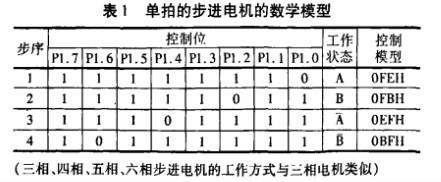
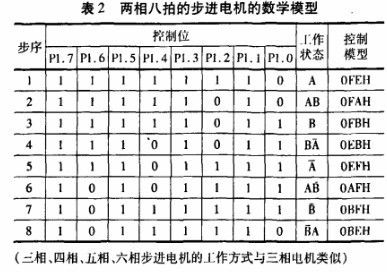
4.1.6兩相步進電機的數學模型
單拍的步進電機的數學模型
|









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

