第一章 緒論
隨著社會的發展和科技的進步,人們對生產設備提出了速度更快、精度更高的使用要求,電機作為生產設備最為重要的驅動源,在人們的日常生活和工業生產活動中具有廣泛應用,發揮著不可替代的作用。基于單片機的直流電機控制系統不僅結構簡單可靠,而且易于編程控制,具有非常好的調速性能。
1.1 本文研究的目的
由于直流電機具有非常好的機械性能,多種多樣的控制方式,以及非常好的環境適應性,因此,直流電機在很多工業現場得到越來越廣泛的應用[1-2]。直流電機控制系統的好壞直接影響電機性能的發揮。在上世紀七八十年代,由于電子技術的落后,很多的直流電機還是依賴復雜的模擬電路進行控制,這種模擬電路采用分離原件搭建,不僅結構復雜,功能單一,而且一個控制電路智能適應某一型號的直流電機,這也導致了這種控制系統的通用性比較差,正是因為直流電機控制系統存在這些缺點,所以,直流電動機的應用具有很大的局限性[3-5]。隨著電子技術的發展,雖然后來的模擬點電路具有比較好的性能,能夠滿足某些方面的基本需求,但是模擬元件在大功率電機運行強干擾的環境下,很容易受到干擾,造成性能下降,甚至發生事故。[6-8]。隨著科學技術的發展,尤其是電子技術和傳感器技術的進步,很多功能都可以封裝在集成電路中實現,而且隨著微型計算機的普及,很多復雜算法和控制功能都可以通過微型計算機實現,所以電機控制系統的到了飛速發展,不僅具有非常好的控制性能,而且抗干擾能力更強,大大推動了直流電機的普及和應用[9]。
隨著科學技術的進步,當前的直流電機控制系統已經逐漸實現由模電控制往數字控制方向發展,特別是單片機的普及,大大促進了直流電機控制系統的發展[10]。未來的直流電機控制系統正在往智能化方向發展,本文正是在這樣的發展趨勢下,選擇了基于單片機的直流電機控制系統設計這樣一個研究課題,具有比較大的研究意義。
1.2 國內外研究現狀
隨著電子元器件設計加工技術成熟和節能環保意識的加強,電機的控制技術也隨之發生了巨變化。電力電子技術以及微機技術的飛速發展,對電機控制方法產生了巨大影響[11-13]。直流電動機的驅動控制經歷了幾個發展階段。最初由開關控制使電機工作在通斷模式,這個開關后來逐漸被雙向可控硅替換,半控型功率器件電機控制成為發展主流[14]。八十年代,出現了全控型功率器件,比如:晶閘管、GTR、IGBT等高性能開關器件,這種具有自關斷能力器件不斷發展,基本上已經全部取代了普通晶閘管,由于普通晶閘管使用必需有換相電路相配套,而全控型功率器件不需要,因此使電路得到大大的簡化;除此之外,這些器件還具有很高的開關頻率,從而提高了電機工作頻率,降低了噪聲,同時整個系統的的體積也得到了很好的控制[15-17]。上個世紀八十年代,基于脈沖寬度調制技術的電動機的控制系統被研發出來,最早利用在驅動功率較小、不可逆的控制系統中。近期,由于電路技術的不發展和晶體管器件性能不斷提高,市場上出現了以脈寬進行調速的永磁直流電動機,這大大加快了脈沖寬度調制技術的發展,同時也對電動機驅動技術產生了推力。早期的脈沖寬度調制技術是被用在軍事領域,它的優異性能,能夠滿足那些對速度和精度都有高要求的跟蹤系統里。近些年,該技術不斷被應用在各種工業上[18]。
十九世紀三十年代,法拉第最早發現電磁感應現象,為電機的提供了堅實的理論基礎。在后來的十年時間里,世界上第一臺直流電機就被研制出來,在隨后的幾十年里,直流電機不斷完善,技術不斷成熟。隨著直流電機的發展,直流電機控制器也不斷進步[19]。1918年,美國人Lamgnal就開發出最早的水銀整流器,并成功開發出由電機調速用的逆變裝置;二十世紀三十年代,有部分研究人員提出采用離子設備對定子繞組進行控制,但是最終實驗表明,這種裝置的可靠性不高、控制的效率非常低、設備非常笨重,因而很快被放棄了[20]。隨著科學技術不斷發展,半導體技術取得前所未有的進步。開關型晶體管的研制成功,為創造新型電機——無刷直流電機帶來了生機。D.Hanrisanz在1950年第一次申請了用晶體管換向代替電刷進行換向的專利,為無刷直流電機的發展奠定了良好的基礎[21]。隨著半導體技術的土匪猛進,美國人在1962年利用霍爾效應成功研發出了無刷直流電機[22]。隨后霍爾元件在電機控制中的利用取得重大突破,開始迅速普及,由于它的靈敏度比二極管高出很多倍,因此電機的控制性能也非常好。1965年德國人Mieslonler第一次提出電容移相對電機進行換流的控制方法,在這個理論提出后不久,德國人第一次研制出了利用環形分配器以及過零鑒別器無刷直流電機進行換向操作的控制器。到上個世紀八十年代,晶閘管技術取得飛速發展,已經開始逐漸取代了傳統的直流電機控制裝置,直流得控制方式得到了進步[23]。
我國在直流電機控制器方面的研究,起步比歐美等發達國家晚,在上個世紀六十年代才開始進行硅晶閘管研制,在隨后的幾十年里,以晶閘管為基礎的直流電機調速系統也得到大規模的應用[24]。隨著社會的不斷進步和需求的不斷提高,用戶對電機性能和控制要求也越來越高,除了要具有結構簡單、可靠性好、安全性高等特性,還要考慮電動機的穩定性和環保性,這些都必須遵守嚴格環國家標準。當前,更高性能電力電子器件一定會出現,已有的成熟的電力電子器件還會不斷地升級改進。
1.3 論文設計內容
本文設計了一套直流電機控制系統,該系統可以對直流電機進行閉環調速,使系統精確地輸出速度值。直流電機控制系統可以通過速度傳感器對當前電機轉速進行實時采樣,系統將這個采樣值和設定值進行對比,檢查速度是否偏離,如果有速度差,系統就會通過算法輸出控制信號去減小這個差值,直到最后速度達到設置值。這種基于單片機的直流電機控制系統不僅結構簡單可靠,而且易于編程控制,具有非常好的調速性能。本系統是以STC89C52單片機為主控制器,采用L298驅動芯片驅動直流電機,電機的速度利用光電對管進行檢測,反饋回來的速度在單片機中完成PID算法計算,輸出可變占空比的脈沖波(PWM)對驅動電路進行控制,從而使電機的速度穩定到設置值大小,電機的轉速可以通過按鍵進行設置,液晶顯示器可以實時顯示電機當前的轉速和設置的轉速。
第二章 系統總體方案設計
2.1 系統總體方案設計
本文設計的直流電機控制系統包括六大部分:電源電路、測速電路、單片機最小系統電路、電機驅動電路、按鍵電路和顯示電路。直流電機控制系統可以通過速度傳感器對當前電機轉速進行實時采樣,系統將這個采樣值和設定值進行對比,檢查速度是否偏離,如果有速度差,系統就會通過算法輸出控制信號去減小這個差值,直到最后速度達到設置值。系統工作原理圖如下圖2.1所示。
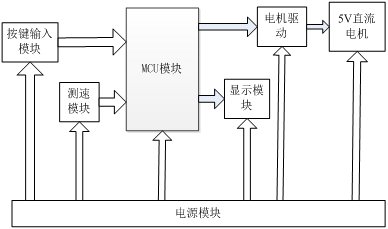
圖2.1系統工作原理圖
2.2 各模塊選型
- 單片機模塊:STC89C52單片機是STC公司生產的一款主流單片機,它是8位的單片機,具有8K字節的可編程存儲空間。該型號的單片機的可反復擦除次數高達1000多次,該型單片機輸入輸出口非常多,中斷功能也比較豐富,單片機具有兩個定時器,每一個定時器都是16的。
(2)測速模塊:直流電機控制系統可以通過速度傳感器對當前電機轉速進行實時采樣,測速模塊通過碼盤和光電管組合使用實現,通過LM393 芯片處理后輸入單片機。
(3)電機驅動模塊:L298是SGS公司生產的電機驅動芯片。它不僅可以驅動步進電機,也可以對直流電機進行控制。L298N的控制信號使標準TTL電平,該款芯片可以接受的電壓范圍很廣,可以驅動最大電流為3A的電機負載。
(4)電源模塊:通過電源適配器為系統低筒電能,正常工作的電壓為5V。
(5)顯示模塊:液晶顯示器可以顯示字母、數字以及符號,在本文的直流電機控制系統中,可以通過液晶顯示器來顯示直流電機工作過程中的速度值和設置值。
(6)按鍵模塊:本文選用獨立按鍵實現人機交互功能,使用者可以通過按鍵對電機轉速和轉動方向進行設置。
第三章 系統硬件電路設計
3.1 單片機最小系統設計
STC89C52單片機引腳如下圖3.1所示:
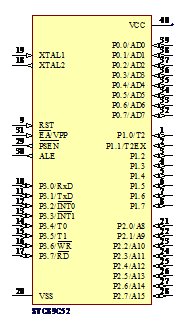
圖3.1 STC89C52芯片引腳圖
各個引腳的功能如下:
VCC:供電電壓。
GND:接地。
P0口:它是一個雙向輸入輸出口,一共有八位,全部都是開漏極形式。當某一位管腳被置高電平時,就相當于這個位被設置為高阻。該端口除了可以當做普通輸入輸出口用之外,還可以用來擴展外部存儲器,當這個端口用來擴展16位的外部存儲器時,它是低八位的輸出地址,通過外界擴展存儲器可以提高單片機的存儲性能。
P1口:它是一個雙向輸入輸出口,一共有八位,這個口需要內部提供上拉電阻才能實現一些功能。
P2口:它是一個雙向輸入輸出口,一共有八位,這個口需要內部提供上拉電阻才。當該端口某一管腳被置高電平后,內部的上拉電阻將改為強行拉高后再輸入,當該端口某一管腳被置低電平后,因為單片機內部上拉電阻的存在,會有電流輸出。當這個端口用來擴展16位的外部存儲器時,它是高八位的輸出地址。
P3口:它是一個雙向輸入輸出口,一共有八位,這個口需要內部提供上拉電阻才能實現一些功能。當該端口某一管腳被置高電平后,內部的上拉電阻將改為強行拉高后再輸入。當該端口某一管腳被置低電平后,因為單片機內部上拉電阻的存在,會有電流輸出。
一些特殊功能也是通過P3口實現的,具體如下:
管腳 備選功能:
P3.0 RXD(串行輸入口)
P3.1 TXD(串行輸出口)
P3.2 /INT0(外部中斷0)
P3.3 /INT1(外部中斷1)
P3.4 T0(計時器0外部輸入)
P3.5 T1(計時器1外部輸入)
P3.6 /WR(外部數據存儲器寫選通)
P3.7 /RD(外部數據存儲器讀選通)
P3口同時為閃爍編程和編程校驗接收一些控制信號。
RST:復位輸入。當RST腳持續兩個機器周期的高電平時間時,單片機復位。
PSEN:外接的程序存儲器的片選信號。
XTAL1:內部時鐘工作電路輸入端口。
XTAL2:來自反向振蕩器的輸出端口。
為了使單片機工作,系統至少會包含一個時鐘電路和一個復位電路,因此又被稱為單片機最小系統。為了實現復位功能,至少要讓復位腳維持至少相當于兩個機器周期時間的高電平,這樣才能完成系統復位,復位信號從單片機的第九腳輸入,手動按下復位按鍵,復位腳輸出一個高電平;當松開復位鍵后,電源給電容充電,此時的復位腳輸出電平慢慢變小,直到電容充滿電,才輸出一個低電平,在按鍵按下到輸出高電平這段時間遠遠大于兩個機械周期,所以可以手動對單片機進行復位。單片機最小系統的時鐘電路則為內部功能提供時鐘信號,考慮到編程的方便性,這里選擇的晶振為12MHz,它通過兩個電容并聯輸入到單片機的外部時鐘引腳。單片機的最小系統原理圖如下圖3.2所示,最小系統的外圍電路圖如下圖3.3所示。
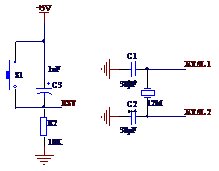
圖3.2 時鐘電路和復位電路
單片機的最小系統圖如圖3.3所示。
圖3.3STC89C52芯片最小系統圖
3.2測速模塊電路
3.2.1 速度測量方法
直流電機控制系統可以通過速度傳感器對當前電機轉速進行實時采樣,測速模塊通過碼盤和光電管組合使用實現,通過LM393 芯片處理后輸入單片機。常見的速度測量方法有以下三種。
1)M法測速
在一定測量時間T內,測量脈沖發生器(替代輸入脈沖)產生的脈沖數m1來測量轉速,“M”法測量轉速脈沖如圖3.4所示,設在一定時間T內,電機轉軸轉過的弧度為Xτ,則轉速n可以用下式3.1-3表示:
n= (3.1)
(3.1)
轉軸轉過的弧度數Xτ可用下式所示m1
 (3.2)
(3.2)
圖3.4“M”法測量轉速脈沖
將(3.1)式代入(3.2)式得
轉速n的表達式為:
n= (3.3)
(3.3)
2)T法測速
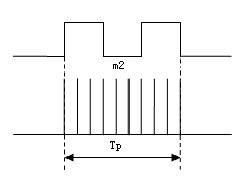
采用T法測速,轉速是根據兩個脈沖的時間間隔來計算。碼盤有單線和多線可以選擇,當選用單線碼盤時,只要知道兩次脈沖的時間間隔就能夠算出轉速。當選用單線碼盤時,測量的時間只是每轉的1/N(N為碼盤的線數)。“T”法脈寬測量原理如下圖3.5示。定時器對時基脈沖進行計數定時,如果在一個TP內計數值是m2,則計算公式為:
n=

(3.4)
即:

(3.5)
圖3.5“T”法脈寬測量
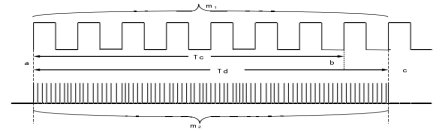
3) M/T法法測速
所謂M/T法測速,即是結合了“M”法和“T”法分別對轉速低和高時具有的不一樣的精度,結合它們兩者的優點的方法,其方法的精度是介于“M”法和“T”法之間,“M/T”法定時/計數測量如圖3.6所示。
圖3.6 “M/T”法定時/計數測量
根據上述分析,由公式3-4和公式3-5可以對到出M/T法測量轉速的公式如下:

(3.6)
3.2.2 測速模塊電路設計
測速模塊電路如圖3.7所示。電阻R4的作用是限流,保證光電管的穩定運行,電阻R3的作用是對光電管輸出進行上拉,通過這個上拉電阻可以把電阻的變化轉換成電壓的變化。由于輸出的電壓還是不標準,因此,我們在后端還設計了一個比較器,信號變化經過比較器就可以輸出一個標準的脈沖信號。
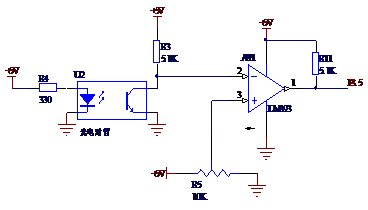
圖3.7 測速模塊電路圖
3.3 電機驅動電路
3.3.1 L298N簡介
L298是SGS公司生產的電機驅動芯片。它不僅可以驅動步進電機,也可以對直流電機進行控制。L298N的控制信號使標準TTL電平,該款芯片可以接受的電壓范圍很廣,可以驅動最大電流為3A的電機負載。當我們用L298同時驅動2路電動機時,需要從兩對輸出口接線。L298N的控制邏輯如下表3.1所示。
表3.1 L298N功能邏輯圖
3.3.2 L298N直流電機驅動電路設計
本文設計的電機驅動電路如下圖3.8所示。我們選用單片機3.1端口和3.2端口兩個端口對電機的方向進行控制,用3.0端口產生脈沖波,通過控制脈沖波(PWM)可以改變電機轉速。為了阻值電流回流,保證電路可靠運行,我們在輸出端接有保護二極管。
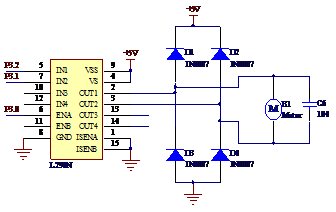
圖3.8 電機驅動電路
3.4 按鍵電路
本文設計的按鍵電路如下圖3.9所示。為了簡化編程,節約單片機引腳資源,這里采用的是獨立按鍵。為了實現電機的控制功能,這里設計5個按鍵,按鍵從左到右分別是模式按鍵,電機速度加,減,確定按鍵和電機的正反轉控制。

圖3.9 按鍵電路
3.5 LCD1602顯示電路
3.5.1 LCD1602引腳功能介紹
液晶顯示器引腳說明如下:
1腳:VSS接電源負。
2腳:VDD接電源正。
3腳:VL腳通過外接一個滑動變阻器,可以對液晶顯示屏的對比度進行調節,滑動變阻器分壓最小時,液晶顯示屏的對比度最低,滑動變阻器分壓最大時,液晶顯示屏的對比度最高,滑動變阻器的阻值一般取為10K。
4腳:RS是指令和數據的選擇端口,如果給這個引腳置位高電平,則表示選取數據寄存器功能,如果給這個引腳設置低電平,則表示選取指令寄存器功能。
5腳:R/W是讀寫控制端口,如果這個引腳給高電平,則設置為讀控制,如果這個引腳給低電平,則設置為寫控制。
6腳:EN是使能控制端口,只有在這個端口的下降沿,才能實現液晶顯示器的各部分功能。
7~14腳:D0~D7為8位雙向數據線。
15腳:背光源正極。
16腳:背光源負極
3.5.2 LCD1602驅動電路設計
液晶顯示器可以顯示字母、數字以及符號,在本文的直流電機控制系統中,可以通過液晶顯示器來顯示直流電機工作過程中的速度值和設置值。液晶顯示電路如下圖2.6所示,上圖中的電阻R1就是用來調節液晶顯示器背光的。
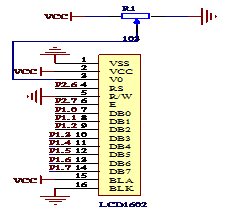
圖3.10 LCD1602驅動電路
第四章 系統軟件設計
4.1 PID算法簡介
為了實現直流電機速度的準確測量,這里選用PID算法對電機進行的速度進行閉環控制。PID算法可以分為模擬PID和數字PID兩種。
4.1.1模擬PID
在早期的控制系統中,模擬PID控制系統被認為最有效,最可靠的控制系統之一。模擬PID控制系統的工作原理如下圖4.1所示。
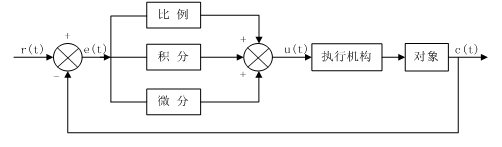
圖4.1 模擬PID控制系統工作原理
該PID控制控制器的調節過程非常線性,通過對比實際測量值 和設定值
和設定值 的值,計算出系統的誤差:
的值,計算出系統的誤差:
 =
= -
- (4.1)
(4.1)
計算出的偏差在控制器中進行比例、積分、微分運算,得出控制信號,控制信號通過轉化處理最終作用在控制對象上,使被控對象按設定值運行,故稱為PID調節器。模擬PID控制器的計算公式4.2:
 (4.2)
(4.2)
4.1.2數字PID
為了便于計算機運算,使模擬PID按照一定規律離散化,這里對公式4.1進行變形為 :
 =
= -
- (4.3)
(4.3)
由于采樣實物周期比較短,這里可用近似的方法替代,于是就有:
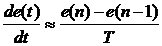 (4.4)
(4.4)
 (4.5)
(4.5)
通過上述處理,上面的公式4-2就可以等效為:
 (4.6)
(4.6)
上面公式中的從左往右依次是比例項、積分項和微分項。
這三種作用通常都是單獨使用或者合并使用,組合使用時有以下幾種方式:
P控制:  (4.7)
(4.7)
PI控制:  (4.8)
(4.8)
PD控制: 
 (4.9)
(4.9)
PID控制:  (4.10)
(4.10)
通過分析4.6,可以得出由于位置式PID算存在偏差累積的缺點,這里對其進行了改進,具體如下:
 (4.11)
(4.11)
將式2.6和式2.11相減,就會得到增量式PID的計算公式如下:

 (4.12)
(4.12)
從上式可得數字PID位置型控制算式為:
 (4.13)
(4.13)
式中:  稱為比例增益;
稱為比例增益;
 稱為積分系數;
稱為積分系數;
 稱為微分系數。
稱為微分系數。
位置式PID和增量式PID的控制原理圖分別如圖4.2和4.3所示。
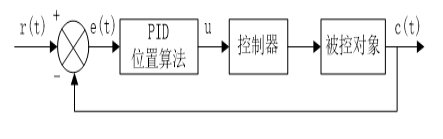
圖4.2 位置式PID控制原理圖
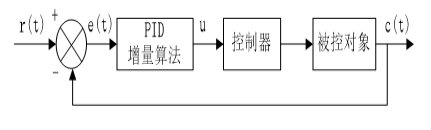
圖4.3 增量式PID控制原理圖
通過上述分析,對模擬式PID和數字式PID進行了詳細分析介紹,本設計最終選擇數字式PID作為控制算法。
4.2系統主程序流程
系統主程序流程如圖4.4所示。系統上電后首先進行初始化,然后對按鍵進行描設,判斷速度按鍵有沒有被按下,如果速度按鍵被按下了,系統就會跳到速度設定程序對速度進行設定,,如果速度按鍵沒有被按下,單片機直接讀取當前電機的轉速。通過PID算法計算,輸出控制信號,使速度穩定在設置值。液晶顯示器顯示當前的轉速和設置的轉速。
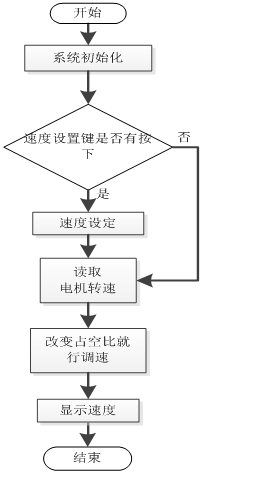
圖4.4系統主程序流程圖
4.3 定時器T0中斷服務程序流程
定時器T0中斷服務程序流程如圖4.5所示,中斷響應后,首先關閉中斷進行數據處理,通過讀取計數器數值來計算速度,然后調節PWM來進行調速,之后將計數器清零,重新為定時器裝初值,在打開中斷。

圖4.5 定時器T0中斷服務程序流程圖
4.4 按鍵掃描程序流程
按鍵掃描流工作的程圖如下圖4.6所示,系統完成初始化后,在循環程序中對按鍵進行掃描,掃描的目的是實時檢測有沒有按鍵按下,如果檢測到有按鍵按下,這是還不能判斷是否真的按下按鍵,還必須進行消抖處理,防止抖動對判斷產生誤判,完成消抖處理后,還需要再次對按鍵進行檢測,如果這次還是檢測到有鍵按下,那么就會執行相應的操作。

圖4.6 鍵盤掃描流程圖
4.5 LCD1602寫控制
液晶顯示器的寫控制流程圖如圖4.7所示。液晶顯示器在實現寫控制過程中,首先會檢查光標有沒有開啟,并完成清除屏幕等初始化操作。然后系統會根據設置的程序判斷顯示位置在哪里,對液晶顯示器進行地址寫操作。最后系統把需要顯示的內容通過送到顯示器中顯示。通常情況下,我們只要掌握如何對液晶進行寫操作,就可以實現各種顯示功能。

圖4.7 LCD1602寫控制流程圖
致 謝
在本次畢業設計中,從選定題目到查詢相關材料,再到設計電路,程序設計,對這些我都付出了很多心血,但每個人的知識儲備并非那么全面,僅僅一個人的努力是不夠。因此,只有在得到了很多老師和同學的支持下,我才能完成這個設計。在這里,我要特別感謝我的導師XX老師,在畢業設計的開始,老師給了我很多幫助,指導我了解了很多單片機的相關知識,并在當我設計遇到困難時,及時的給予幫助和鼓勵,同時,對我其他學科的鼓勵也滲透在畢業設計時,給了我莫大的信心,為我順利完成畢業設計起到了非常重要的作用。而在最后整理論文時,總是在認真閱讀之后給予我認真的評價,使得我的論文無論是從內容上還是格式上都有了很大的進步。我還要感謝實習組及實驗室的所有老師,為我的畢業設計提供了非常便利的條件。最后還要感謝幫助我的同學,在我遇到困難時給予我耐心的幫助,沒有他們無私的幫助,也不會有我今天的畢業設計。
參考文獻
[1]李輝,石書琪,竇樂,邱雄邇,劉新波. 基于STM32單片機的數字直流調速系統的設計[J]. 邵陽學院學報(自然科學版),2017,(01):88-92.
[2]李美艷. 基于單片機的直流電機調速系統的設計[J]. 電子設計工程,2016,(22):158-160.
[3]詹莊春. 單片機控制的直流電機閉環調速系統設計[J]. 綿陽師范學院學報,2016,(11):23-27.
[4]高強,郭金文,尹超毅. 基于STM8S207直流電機控制教學實驗系統設計[J]. 電氣電子教學學報,2016,(06):116-119.
[5]謝檬,郭霞. 智能小車控制系統設計[J]. 傳感器與微系統,2016,(12):1-3.
[6]王恒,李陳康. 基于雙單片機的無刷直流電機調速系統的設計[J]. 物聯網技術,2015,(12):47-50.
[7]朱虎,林立,馮雪,劉正奇. 車用微電機閉環直流調速系統的設計[J]. 機電技術,2015,(06):92-94+98.
[8]尹冬梅. 基于單片機控制的PWM直流電機調速系統[J]. 科技傳播,2015,(24):155+157.
[9]彭代欣. 基于AT89S52單片機的直流電機調速系統[J]. 山東工業技術,2016,(03):149.
[10]朱新華,周龍. 基于單片機的直流電機調速系統設計[J]. 現代制造技術與裝備,2016,(01):72-74.
[11]黃桂梅,劉永立,邵聯合. 基于單片機的直流電機調速系統設計與實踐[J]. 電氣自動化,2016,(01):1-2+5.
[12]胡進德. 基于STC89C52單片機的乒乓球升降高度自動控制系統設計[J]. 自動化應用,2016,(02):34-36+40.
[13]雷慧杰. 基于STM32的直流電機PID調速系統設計[J]. 現代電子技術,2016,(08):165-167+170.
[14]劉彤. 基于STM8S單片機的無刷直流電機控制器的設計[J]. 科技經濟導刊,2015,(18):105-106.
[15]周陽,周美嬌,殷弋. 直流電機調速系統設計及PID參數整定[J]. 電子科技,2016,(05):153-157.
[16]胡淑環,穆逢春. 直流電機轉速控制系統的設計與實現[J]. 黑龍江科技信息,2016,(16):99.
[17]李建莉. 溫度控制直流電動機轉速系統的設計與仿真[J]. 科技與創新,2016,(14):87+90.
[18]劉彤. 基于單片機的直流電機閉環調速控制系統[J]. 電子世界,2016,(15):196-197.
[19]龍治紅,譚本軍,黃華飛. 基于單片機的直流電機控制[J]. 科技展望,2016,(28):117.
[20]朱睿,郭盛杰. 基于單片機STC12C52系列直流電機調速系統[J]. 山西電子技術,2015,(05):3-4+7.
[21]閉呂慶,黃祖明,藍仁朗,農飛,李顯圣. 基于單片機的直流電機控制參數測定系統的設計[J]. 廣西職業技術學院學報,2015,(05):7-9.
[22]Ji You Fei,Hua Li,Bin Gao. Based on the Single Chip Microcomputer Atmega168 Robot Control System Design[J]. Applied Mechanics and Materials,2013,2516(341):.
[23]Jun Li Wan,Shi Run Cheng,Hao Liu. The Electronic Throttle PID Control System Based on Single Chip Microcomputer[J]. Applied Mechanics and Materials,2014,3458(631):.
[24]Ai Cheng Zou,Qun Ying Wang,Yi Jie Cao. Design of PWM DC Motor Control System Based on Single Chip[J]. Advanced Materials Research,2014,3470(1030):.
附錄 A 系統大圖

寶雞文理學院本科畢業論文(設計)開題報告(任務書)
論文題目:
- 立項(選題)依據(學生填寫,包括選題的意義、論文或設計的創新點)
|
- 研究內容(學生填寫,主要觀點或擬解決主要問題及研究方法)
|
三、指導教師意見
經審查,(同意、不同意)開題。
簽名: 年月日 |
寶雞文理學院本科畢業論文(設計)結題報告
論文題目:
|
|
|
|
|
二、指導教師論文(設計)評審意見及成績(指導教師填寫)
(同意、不同意)結題。 成績:(百分制)指導教師簽名: 年月日 |
三、院系畢業論文(設計)指導委員會審查意見: 經審查,(同意、不同意)參加答辯。 簽章(院系公章): 年月日 |
寶雞文理學院本科畢業論文(設計)答辯評分表
題目:
評語:(答辯小組填寫)(能否闡明基本內容和觀點,是否具有創新性,回答提問情況) |
| | | | | |
| | | | |
| | | | |
| | | |
| | | |
| | | |
| | | |
| | |




 [復制鏈接]
[復制鏈接]








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

