|
步進電機控制實驗
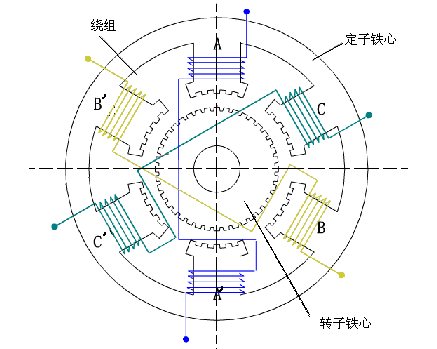
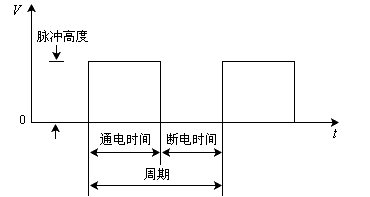
1. 實驗目的(1)學習及掌握三相六拍步進電機工作原理。 (2)學習及掌握單片機與步進電機接口電路連接及控制方法。 (3)學習及掌握步進電機控制程序的設計方法。 2. 實驗設備(1)ZY15MCU12BC2單片機實驗開發裝置一臺。 (2)PC 系列微機及相關軟件。 3. 實驗內容及要求(1)同實驗一。 (2)同實驗一。 (3)步進電機工作原理。 步進電機是現代數字控制技術中最早出現的執行部件,其特點是可以將數字脈沖信號直接轉換為一定數值的機械角位移,并且能夠自動產生定位轉矩使轉軸鎖定。步進電機本質上是一個數字/角度轉換器。圖4-23所示為三相電機結構示意圖。 圖4-23 三相步進電機結構示意圖 由圖4.22可知步進電機的定子鐵心上有6個等分磁極:A、Aˊ,B、Bˊ,C、Cˊ,相鄰兩個磁極間夾角為 ,各相夾角為 ,各相夾角為 ,相對的兩個磁極組成一組A-Aˊ,B-Bˊ,C-Cˊ。定子每個磁極上均勻分布了5個矩形小齒,電機轉子圓周上也均勻的分布著40個小齒,相鄰齒夾角為 ,相對的兩個磁極組成一組A-Aˊ,B-Bˊ,C-Cˊ。定子每個磁極上均勻分布了5個矩形小齒,電機轉子圓周上也均勻的分布著40個小齒,相鄰齒夾角為 。利用電磁學的性質可知,在某相繞組通電時,相應的定子磁極將產生磁場,與轉子形成磁路;如此時定子的小齒與轉子的小齒沒有對齊,則在磁場作用下,轉子就轉動一定角度,達到齒的對齊。 。利用電磁學的性質可知,在某相繞組通電時,相應的定子磁極將產生磁場,與轉子形成磁路;如此時定子的小齒與轉子的小齒沒有對齊,則在磁場作用下,轉子就轉動一定角度,達到齒的對齊。 在圖4.22三相單三拍控制方式下,當電機A相繞組通電,B、C相不通電時,在磁場的作用下,轉子齒和A相定子小齒對齊。設此狀態為初始狀態,并且令與A相磁極中心線對齊的轉子齒為0號齒。由于B相磁極與A相磁極相差,可知 = =  ,不為整數,即此時轉子齒與B相定子小齒不對齊,只是轉子的13號齒靠近B相磁極中心線,且相差 ,不為整數,即此時轉子齒與B相定子小齒不對齊,只是轉子的13號齒靠近B相磁極中心線,且相差  個齒,即相差 個齒,即相差 。如果此時突然變為B相通電,而A、C相都不通電,那么,13號齒就會在磁場的作用下轉到與B相磁極中心線對齊的位置,于是轉子就轉動了個齒,即轉動這個轉動角度稱為步距角 。如果此時突然變為B相通電,而A、C相都不通電,那么,13號齒就會在磁場的作用下轉到與B相磁極中心線對齊的位置,于是轉子就轉動了個齒,即轉動這個轉動角度稱為步距角 ,這就是常說的步進電機“走了一步”。這樣,按照A→B→C→A順序通電1次,可以使轉子轉動。 ,這就是常說的步進電機“走了一步”。這樣,按照A→B→C→A順序通電1次,可以使轉子轉動。 由此得到步進電機的步距角計算公式如下: 式中: 為轉子齒數; 為轉子齒數; 為運行拍數;其中 為運行拍數;其中 為控制繞組相數, 為控制繞組相數, 為狀態系數,單三拍或雙三拍時 為狀態系數,單三拍或雙三拍時 ,單六拍或雙六拍時 ,單六拍或雙六拍時 。 。 同理,若按照A→C→B→A的順序依次通電,步進電機則按相反方向轉動。 (4)步進電機控制原理。 由前述可知,步進電機就是靠控制定子繞組輪流通電而轉動的,驅動繞組的電壓為直流12V,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按照方向控制信號所指示的方向轉動一個固定的角度(步距角),即步進電機“走”了1步。所以,由初始位置,只要知道步距角和走過的步數,便能得到電機最終的位置。因此,可以通過控制步進驅動器輸入脈沖數來控制步進電機角位移量,從而達到準確定位的目的;同時還可以通過控制步進驅動器輸入脈沖頻率來控制電機的速度和加速度,從而達到調速的目的。 綜上所述步進電機各相繞組通電脈沖的頻率和各相繞組通電順序是控制步進電機轉速和轉動方向的關鍵技術。 步進電機要“步進”,就得產生如圖4.23所示的脈沖信號。圖4-24的脈沖序列是用周期、脈沖高度和通斷時間來描述的。在數字電路中,脈沖高度由元件電平決定,如TTL電平為0V~5V,COMS電平為0V~10V。步進電機每一步的響應,都需要一定的時間,即一個高脈沖要保留一定的時間,以便電機完全達到一定的位置。步進電機轉動角度大小與施加在繞組上的脈沖成正比。通斷的時間可以利用延時在軟件中實現,脈沖序列頻率決定了步進電機的實際工作速率(轉速)。可通過不同長度的延時來得到不同頻率的步進電機輸入脈沖,從而改變步進電機的轉速。 圖4-24 脈沖序列信號示意圖 步進電機轉動方向與輸入脈沖的順序有關,電機的轉速既取決于控制繞組的通電頻率,又取決于繞組的通電方式,表4-4給出三相步進電機的轉動方向與各相繞組通電順序和通電方式的對應關系。其他四相、五相、六相步進電機可以相似而得。 表4-4 三相步進電機轉動對應關系表 | | | | A→B→C→A AB→BC→CA→AB A→AB→B→BC→C→CA→A A→C→B→A AB→CA→BC→AB A→CA→C→BC→B→AB→A | |
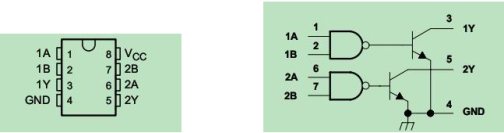
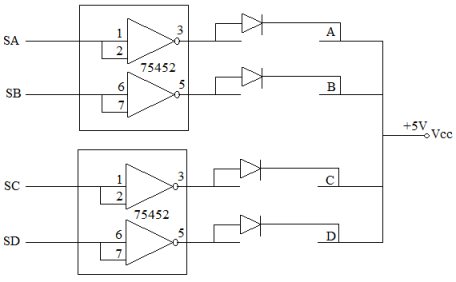
(5)單片機控制步進電機方法及接口電路。 步進電機各相繞組通電脈沖的頻率和各相繞組通電順序是控制步進電機轉速和轉動方向的關鍵技術。由單片機I/O引腳輸出脈沖信號,信號周期可采用軟件延時或定時器定時實現,各相繞組通電順序(方向控制信號)通過程序控制字控制對應的I/O引腳輸出實現。 由于單片機的輸出電壓非常微弱(0V~5V),不能直接驅動步進電機,從單片機輸出的電壓信號必須經過放大電路放大后才可以驅動步進電機。ZY15MCU12BC2實驗平臺步進電機驅動器由2片驅動芯片75452實現,75452是雙外圍器件驅動芯片,其引腳和內部邏輯圖如圖4-25(a)、(b)所示。 75452內部由兩個與非門及三極管放大電路構成,圖(a)中1A、1B和2A、2B分別是內部兩個與非門的輸入引腳,接收外部數字脈沖信號,輸入信號經內部三極管放大后通過引腳1Y、2Y輸出。 (a) 75452 引腳圖 (b) 75452 內部邏輯圖 圖4-25 75452 引腳及邏輯圖 ZY15MCU12BC2實驗平臺步進電機驅動器為四相四拍驅動,四相步進電機驅動器接口電路如圖 4-26所示。 圖4-26 實驗平臺四相步進電機驅動器接口電路圖 圖中SA、SB、SC、SD分別是2片75452的輸入信號,單片機P1.0 ~ P1.3接SA~SD,由P1口按四相四拍順序輸出控制碼驅動步進電機運轉,步進電機的步距角 ,即電動機轉動1周為100步。 ,即電動機轉動1周為100步。 驅動電路由脈沖信號來控制,電機轉動方向與線圈通電順序有關。根據四相四拍控制方法,步進電機正轉和反轉時SA、SB、SC、SD通電順序如下: 步進電機正轉:  步進電機反轉:  各線圈通電順序與P1.0 ~ P1.3脈沖分配方式產生的勵磁邏輯如表4-5所示: 表4-5 四相單四拍步進電機轉動勵磁邏輯表 | | | | | | 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0 | | | | | 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 | | | |
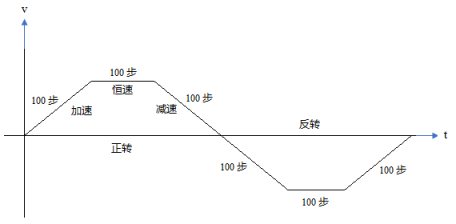
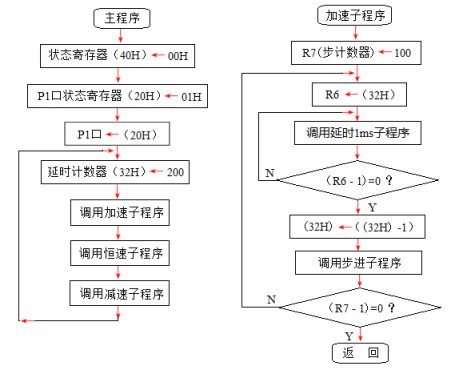
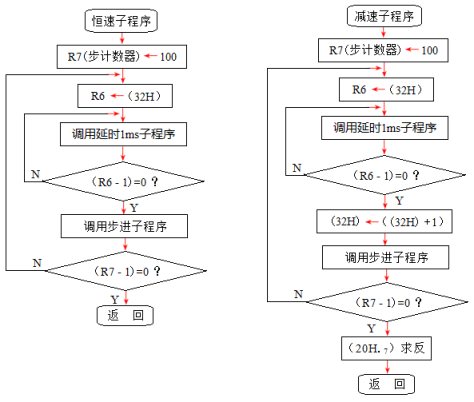
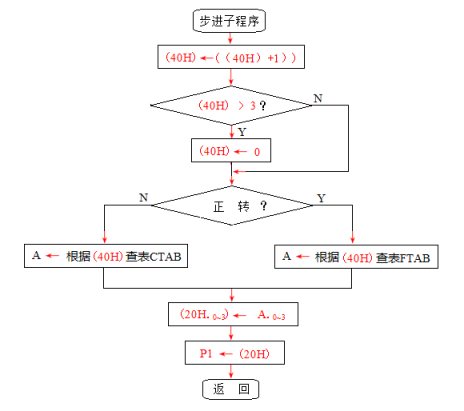
(6)實驗接口電路連接。 單片機P1.0 ~ P1.3接SA、SB、SC、SD和指示燈L0、L1、L2、L3端,當P1.i(i = 0 ~ 3)為“1”時對應線圈通電,此時指示燈應熄滅。(注意:不做此實驗時,步進電機應關閉,使用步進電機手動開關實現。) 編寫并調試步進電機正向驅動子程序、反向驅動子程序和主程序,使步進電機按圖 4-27所示循環工作。 圖4-27 步進電機轉速變化圖 (7)實驗程序包括主程序、加速子程序、恒速子程序、減速子程序和步進子程序,程序流程圖如圖4-28所示。 其中40H單元存放步進電機狀態值,0~3分別對應驅動器SA、SB、SC、SD端口。 20H單元存放P1狀態值,P1.0~P1.3為步進電機通電控制字,P1.7接指示燈L7端,指示電機正轉、反轉:L7燈亮,電機反轉;L7燈滅,電機正轉。 步進電機正轉狀態表:FTAB: 01H、02H、04H、08H; 步進電機反轉狀態表:CTAB: 01H、08H、04H、02H。 圖4-28 步進電機主程序、子程序流程圖 (8)實驗程序(略)。ZY12232.ASM。 (9)在μVision3開發平臺上輸入程序,編譯、連接程序。 (10)調試、運行程序。 ⒈ 實驗電路連接見“圖4-8步進電機實驗電路圖”。 ⒉ 將01H、02H、04H、08H、01H、02H、04H、08H ……寫入P1口,觀察步進電機轉動是否正常,指示燈L3 ~ L0的狀態與寫入P1口的值有何關系。 ⒊ 設置初值:P1口←01H,(20H)←01H,(40H)←0,觀察步進電機是否為正轉現象;P1口←81H,(20H)←81H,(40H)←0,觀察步進電機是否為反轉現象。 ⒋ 修改(32H)單元初值,測試步進電機能夠達到的最大轉速。 (11)實驗結束,拆除接線,將一切整理復原。 4. 實驗預習要求(1)認真閱讀、理解實驗指導書并領會本次實驗目的要求與實驗內容。 (2)仔細閱讀步進電機工作原理、單片機控制方法、實驗平臺接口電路等內容。 (3)仔細閱讀步進電機實驗程序。 5. 實驗報告要求(1)按實驗順序,記錄并分析實驗數據。 (2)實驗程序框圖,實驗程序清單。 (3)寫出實驗結果、實驗體會及對實驗的改進意見。
word格式的選題資料下載地址:
http://www.zg4o1577.cn/bbs/dpj-93744-1.html
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

