關于技術報告和研究論文使用授權的說明
本人完全了解山東省高校第五屆機器人大賽關于保留、使用技術報告和研究論文的規定,即:參賽作品著作權歸參賽者本人,比賽組委會可以在相關主頁上收錄并公開參賽作品的設計方案、技術報告以及參賽機器人的視頻、圖像資料,并將相關內容編纂收錄在組委會出版論文集中。
參賽隊員簽名:
帶隊教師簽名:
日期:
摘要 小車以宏晶公司生產的IAP15F2K61S2芯片為核心,輔助必要的外圍電:包括舵機控制、電機控制、紅外接收、驅動、避障傳感電路。具體由C15芯片 電源模塊、298n電機驅動模塊、火源尋找模塊、滅火風扇等組成。用C語言編程,采用自制穩壓模塊進行穩壓,實現了智能車依次尋找房間,自動躲避障礙,尋找火源(以下簡稱自動模式)。在自動模式下,小車能夠自己在房間內尋找火源并主動向火源靠近,并對滅火結果進行檢驗,經測驗,該智能滅火小車基本達到預期效果。
本系統電源模塊、電機驅動模塊、舵機驅動模塊、火源尋找模塊、主控芯片組成。
在備戰比賽的過程中,學院、老師和同學都給予了我們很大的幫助和鼓勵,在此謹表達對他們由衷的感謝。
關鍵詞:智能車 IAP15F2K61S2 尋線 避障 消防 智能 火焰傳感器
目錄
摘要
關鍵詞:
目錄
第一章 引言
1.1 滅火機器人前景展望
1.2 技術報告章節安排
第二章 系統方案
2.1 電源模塊
2.2 電機驅動的論證與選擇
2.3 主控芯片的論證與選擇
2.4 火源尋找模塊的選擇與論證
第三章 電路設計
3.1電路的設計
(1)系統總體框圖
(2)電機驅動模塊設計
(3)電源模塊設計
(4)5V穩壓電路原理圖
(5)可調穩壓電路原理
(6)電源模塊PCB圖
第四章 程序設計
4.1程序流程圖
4.2電機驅動程序設計
4.3 火源檢測程序設計
第五章 調試與測試
5.1電源:
5.2單片機最小系統:
5.3單片機(程序調試):
5.4驅動電路:
第六章 總結
6.1不足以及改進:
6.2心得:
參考文獻
附錄
附錄1 部分程序源碼
附錄2 電路板設計原理圖
第一章 引言
1.1 滅火機器人前景展望 一直以來,惡劣環境下的工作一直影響著人們的身心健康,很多人希望用機器來取代人類繁雜的體力勞動,這種迫切的需要促使機器人誕生。此后,機器人廣泛應用于各領域。我國從八十年代末就開始研制消防機器人了。但是,我國消防機器人的研究還處在初級段,還有許多問題有待解決。通過機器人比賽,模擬火災現場,研制出能夠用于這些場合的滅火機器人,能夠在惡劣的環境下工作,協助消防人員進行火災的定位和滅火,不僅能提高滅火的準確性,還能保證消防人員的安全,將有極大的社會意義。
1.2 技術報告章節安排本文將對滅火機器人的設計、實際工作原理、滅火流程進行詳細介紹。
- :進行系統方案介紹
- :進行電路設計的介紹
- :進行程序設計的介紹
- :進行各個模塊的測試與調試
第二章 系統方案 本章將分別論證電源模塊、電機驅動模塊、火源尋找模塊主控芯片組成模塊的選擇。
2.1 電源模塊 整個穩壓模塊是我們自己利用L7805穩壓芯片及其他元件焊接而成的,將電池11V電壓穩到5V供給單片機、避障傳感器、火電傳感器。
基于L7805芯片的穩壓模塊成本適中,并且減小了各個模塊間的相互影響,增強系統穩定性。
2.2 電機驅動的論證與選擇方案一:采用L298N驅動直流電動機,該芯片是利用TTL電平進行控制,對電機的操作方便,通過改變芯片控制端的輸入電平,即可以對電機進行正反轉操作,很方便單片機的操作,也能夠滿足直流減速電機要求。采用L298N少占用的空間不容易產生信號干擾。L298N可接受標準TTL邏輯電平信號VSS,VSS可接4.5~7 V電壓。4腳VS接電源電壓,VS電壓范圍VIH為+2.5~46 V。輸出電流可達2.5 A,可驅動電感性負載。1腳和15腳下管的發射極分別單獨引出以便接入電流采樣電阻,形成電流傳感信號。L298N可驅動2個電動機,OUT1,OUT2和OUT3,OUT4之間可分別接電動機,本實驗裝置我們選用驅動兩臺電動機。5,7,10,12腳接輸入控制電平,控制電機的正反轉。ENA,ENB接控制使能端,控制電機的停轉。方案二:采用分立元件組成平衡式驅動電路,這種電路可以由單片機直接對其進行操作,但因為分立元件占用的空間比較大,容易產生信號干擾,且還要配上兩個繼電器,考慮到小車運轉的穩定性,此方案不夠理想。
綜上所述選擇方案一。
2.3 主控芯片的論證與選擇方案一:采用宏晶公司最新STC15系列IAP15F2K61S2單片機作為系統的控制器。單片機算術運算功能強,軟件編程靈活,可用軟件較簡單的實現各種算術和邏輯控制,并且由于其成本低,體積小和功耗低等優點,使其在各個領域應用廣泛;另外,由于本設計中會用到較多的算術運算,所以對本系統來說非常適合利用單片機作為控制器。
方案二:采用Atmel公司的STC12C5A60S2單片機作為系統的控制器。該單片機也屬于51單片機,51單片機的優點這款單片機都能達到,并且這款單片機有著比普通51單片機快12倍的運算速度。
綜上所述,本系統所需處理的信息量比較大,采用方案一作為本系統控制芯片。
2.4 火源尋找模塊的選擇與論證方案一:采用溫度傳感器作為火源尋找模塊的主要傳感器,利用火源外圍溫度比常溫高這一特點尋找火源。此方案雖然易于理解但是溫度傳感器穩定性差,在不同室溫下門限值要求不同,適應性差。并且火源外圍溫度變化范圍窄,不適合遠距離尋找火源。
方案二:在傳感器檢測的時候,火焰傳感器起主要功能。單片機P1口的發光二極管發光個數分別來標志是否有障礙物和火源遠近的程度。那火焰傳感器來說,在這里就需要將采集到的模擬信號轉化為數字信號,這樣才能讓單片機處理。在采集到模擬信號后將它轉化為數字信號后,返回一個轉換值(Temp)進行判斷。當LED僅有小于四個亮時,表示沒有火源;LED=1變化為LED=0的個數依次增加,當LED全部亮時說明滅火小車距離火源最近。
綜上所述:考慮尋找火源的精確度,及外部因素選擇方案二。
第3章 電路設計3.1電路的設計(1)系統總體框圖系統的總體框圖如下圖所示。

(2)電機驅動模塊設計 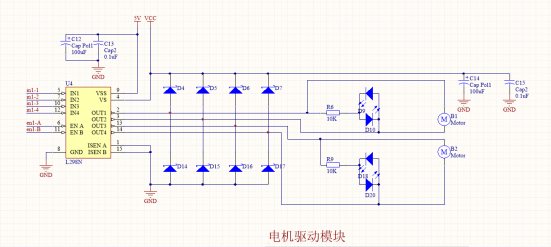
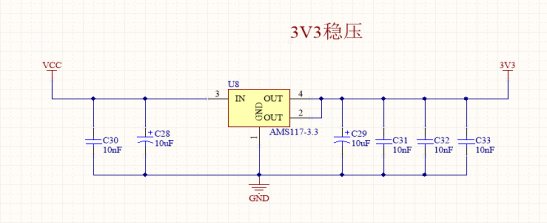
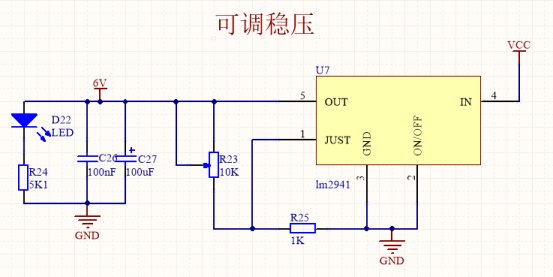
(3)電源模塊設計 本系統的電源模塊包含一個3.3V穩壓電路,一個5V穩壓電路和一個可調穩壓電路。
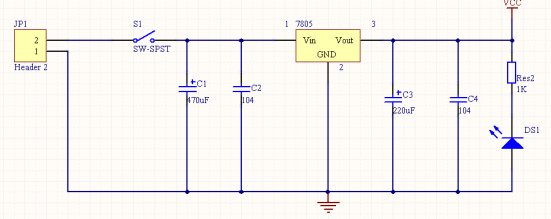
(4)5V穩壓電路原理圖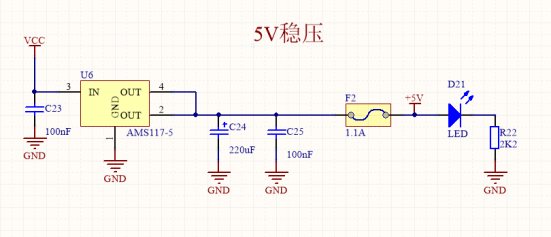
(5)可調穩壓電路原理圖
(6)電源模塊PCB圖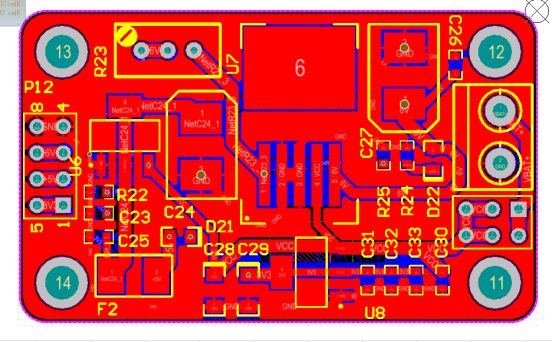
第四章 程序設計4.1程序流程圖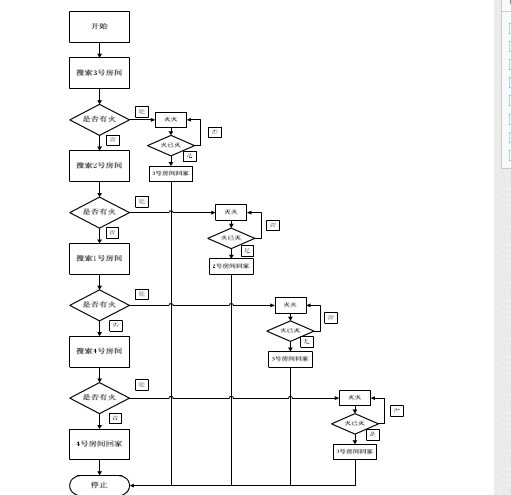
本設計采用宏晶公司最新STC15系列IAP15F2K61S2單片機,作為控制芯片,接收火電傳感器傳來的信號,隨后由單片機向風機發出滅火信號,從而消滅火焰。在尋找火源時,由避障傳感器檢測障礙情況,傳給單片機,由單片機發出信號傳給L298N驅動兩輪實行避障功能。
4.2電機驅動程序設計在電機驅動部分主要是通過單片機對傳感器采集模擬信號反饋回的數字信號進行處理后,來發送指令控制滅火小車運動。主要在void
order(uchar a)函數中當接收到a=0時,小車停止轉動;a=1時,小車向前轉動;a=2時,車向后轉動;a=3時,小車向左轉動;a=4時,小車向右轉動;a為其他值時- 17
時,小車停止轉動。
4.3 火源檢測程序設計在小車經過4個房間,火焰傳感器檢測到火源的時候,由傳感器向單片機發出檢測到火源的信號,單片機檢測到信號之后,向驅動風機的L298N輸入轉動風機的信號,風機轉動,消滅火源。
第五章 調試與測試5.1電源:通過萬用表測試,電壓全部在正常工作范圍內,芯片與電機、風扇均可正常工作。同一個電路里面的所有接地端要共地(某些特殊要求不能共地的除外),否則會讓兩個接地端有壓降。
5.2單片機最小系統:當給定某個I/O口的管腳賦高低電平后,用萬用表測試,也能測試到的高低電平。
5.3單片機(程序調試):功能部分直接看輸出結果。
5.4驅動電路:將驅動電路與單片機連接,用單片機發送指令,直流電機可以正、反轉。
第六章 總結6.1不足以及改進:本作品已完全達到系統設計目標,可以很好的完成上述火源的實時檢測并自動進行滅火操作。滅火小車可以在對于人類來說,危險的火災現場區域進行實時避障檢測火災著火點,并進行自主滅火。但現在還一些不足的地方。比如:在實時檢測過程中,由于程序反復循環次數過多,內存積攢到一定程度,有可能導致程序跑偏,使得滅火小車不能正常工作。想增加內容但對程序要求很高,不易實現,因為要求是實時檢測,如果程序太過復雜,會讓單片機讀取傳感器信號的時間加長,影響實時檢測。 6.2心得:通過這次工程技術綜合實踐,我們了解了一件產品從設計到出廠所經歷的所有過程,對產品的制作過程與制作工藝都有了進一步的了解,現在我才
知道原來一件產品的試產成功真的是一件不容易的事,需要我們具有很強的能力。這次工程技術綜合實踐對我們來說意義重大,不僅增長了我們的見識,豐富了我們的經驗,擴充了我們的知識,提高了我們的動手能力,鍛煉了我們的耐力,培養了我們獨立思考的能力,增強了我們的自信,也更讓我們明白了團結合作的力量,團隊能力的強大。有了這些寶貴的經驗,在以后的工作中相信我們將少走很多彎路,也將更好更快的完成自己的任務。
剛開始做時,我們什么也不知道,甚至不知從何入手,但通過查閱資料,和老師同學探討,逐漸的腦子里有了雛形,不再那么迷茫了,也就越來越有信心了。雖然在制作過程中,我們也遇到了非常多的阻礙,但大家都有信心把它做好,所以都堅持到了最后,終于完成了我們的目標。現在想想,真的非常興奮,看著自己做好的東西,我們心里真有種驕傲和自豪的感覺,因為我們成功了,現在就是想著我們怎樣才能做得更好,因為我們現在有足夠的信心,可以一起團結合作,共同努力。
這次工程技術綜合實踐的時間挺長的,在這段時間我們都感覺真的很忙碌,因為在制作過程中有非常多的不可預見的因素,這主要是因為我們沒完整的做過一件產品,經驗不足所致。在一次一次的調試過程中,我們體會到了作為一個技術人員的艱辛,沒有充足且完備的知識,沒有豐富的經驗,要完成一件產品是一件多么不容易的事啊!
這次工程技術綜合實踐我們最大的感受就是:最難的不是設計電路和編寫程序,而是設計電路時對元器件的選擇,這耗費了我們很多的精力,但效果卻不是最好的,因為走了非常多的彎路。而且我們也知道了,現成的資料不一定是最好的,資料的原理不一定就可以用,很多東西還是得靠自己親身實踐,只有自己實踐出來的才是最好的、可行的。
雖然這次工程技術綜合實踐真的讓我們感覺有點累,但我們的汗水得到了回報。現在我們對科技制作也越來越感興趣了。以后我們也會抓住一切自己所能抓住的機會,參加各種實踐活動,提升自己的能力使自己越來越優秀。
十分感謝我們學校工訓的老師們,老師們都非常的平易近人,對我們非常好,給予了我們非常大的幫助,讓我們學到了很多東西,真的非常感謝你們!
學校對我們工科類學生開設工程技術綜合實踐這門課程真的非常好,不僅讓我們提前了解了真正的產品的實現流程,也讓我們的綜合素質得到了提高,真是一舉多得。非常感謝學校給我提供了我們這樣一次鍛煉自己、提升自己、挑戰自己的機會。
參考文獻[1] 卓晴,黃開勝,邵貝貝等.學做智能汽車[M].北京:北京航空航天大學出版 社,2007.
[2] 競賽秘書處,電磁組競賽車模路徑檢測設計參考方案(版本1.0).2010.1.
[3] 王威等,HCS12 微控制器原理及應用.北京:北京航空航天大學出版 社,2007.10.
[4]張景川,劉立陽,傅家祥.新型滅火機器人的設計與實現[J].電腦知識與技術, 2008,4(35):2246-2248..
[5]李彬,陳帝伊,馬孝義.智能滅火機器人系統的設計與實現[J].機械與電子,2010,(1):57-61.
[6]張睿,趙艷華,劉志剛.精通Protel DXP 2004電路設計[M].北京:電子工業出版社,2006.
[7]楊欣,萊·諾克斯,王玉鳳劉湘黔.電子設計從零開始[M].北京:清華大學出版社,2010.
[8]張義和等.例說51[M],北京:人民郵電出版社,2008.
[9] 杜剛,電路設計與制板:Protel應用教程[M].北京:清華大學出版社,2006.
[10] 聶榮等,實例解析PCB設計技巧[M].北京:機械工業出版社,2006.
[11] 陳伯時,電力拖動自動控制系統——運動控制系統[M].北京:機械工業出版 社,2008.
[12] 梅曉榕,自動控制原理(第二版).北京:科學出版社,2007.2











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

