測(cè)頻原理
所謂“頻率”,就是周期性信號(hào)在單位時(shí)間變化的次數(shù)。電子計(jì)數(shù)器是嚴(yán)格按照 的定義進(jìn)行測(cè)頻,其對(duì)應(yīng)的測(cè)頻原理方框圖和工作時(shí)間波形如圖1 所示。從圖中可以看出測(cè)量過(guò)程:輸入待測(cè)信號(hào)經(jīng)過(guò)脈沖形成電路形成計(jì)數(shù)的窄脈沖,時(shí)基信號(hào)發(fā)生器產(chǎn)生計(jì)數(shù)閘門信號(hào),待測(cè)信號(hào)通過(guò)閘門進(jìn)入計(jì)數(shù)器計(jì)數(shù),即可得到其頻率。若閘門開啟時(shí)間為
的定義進(jìn)行測(cè)頻,其對(duì)應(yīng)的測(cè)頻原理方框圖和工作時(shí)間波形如圖1 所示。從圖中可以看出測(cè)量過(guò)程:輸入待測(cè)信號(hào)經(jīng)過(guò)脈沖形成電路形成計(jì)數(shù)的窄脈沖,時(shí)基信號(hào)發(fā)生器產(chǎn)生計(jì)數(shù)閘門信號(hào),待測(cè)信號(hào)通過(guò)閘門進(jìn)入計(jì)數(shù)器計(jì)數(shù),即可得到其頻率。若閘門開啟時(shí)間為 、待測(cè)信號(hào)頻率為
、待測(cè)信號(hào)頻率為 ,在閘門時(shí)間T內(nèi)計(jì)數(shù)器計(jì)數(shù)值為N,則待測(cè)頻率為
,在閘門時(shí)間T內(nèi)計(jì)數(shù)器計(jì)數(shù)值為N,則待測(cè)頻率為

若假設(shè)閘門時(shí)間為1s,計(jì)數(shù)器的值為1000,則待測(cè)信號(hào)頻率應(yīng)為1000Hz或1.000kHz,此時(shí),測(cè)頻分辨力為1Hz。
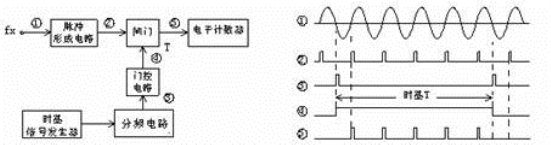
圖1 測(cè)頻原理框圖和時(shí)間波形
二、系統(tǒng)設(shè)計(jì)
(一)設(shè)計(jì)框圖

主要原理:該頻率計(jì)數(shù)器主要是由信號(hào)處理電路部分、單片機(jī)AT89C51控制部分、8位LED數(shù)碼管顯示器部分等組成。該系統(tǒng)的功能是將信號(hào)輸入P3.4口,通過(guò)單片機(jī)程序控制,對(duì)LED數(shù)碼管顯示器進(jìn)行段控和位控,這些就是為了實(shí)現(xiàn)動(dòng)態(tài)顯示。
1、單片機(jī)的時(shí)鐘電路
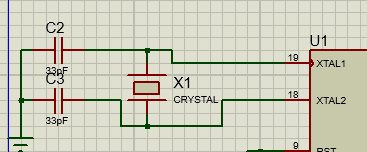
圖2 晶振電路
晶振是一種能把電能和機(jī)械能相互轉(zhuǎn)化的晶體在共振的狀態(tài)下工作,以提供穩(wěn)定、精確的單頻振蕩。在通常情況下,晶振的精確度達(dá)到百萬(wàn)之五十。我們需要晶振提供時(shí)鐘周期然后使得單片機(jī)能夠執(zhí)行代碼。晶振X1、電容C2/C4及片內(nèi)與非門(作為反饋、放大元件)構(gòu)成了電容三點(diǎn)式振蕩器,振蕩信號(hào)頻率與晶振頻率及電容C4、C2的容量有關(guān),但主要由電路中晶振頻率決定.。
我選用2.4MHz頻率的晶體,電路允許輸入的脈沖頻率為10kHz。電容的大小范圍為一般為20pF~40pF,本次設(shè)計(jì)我們居中選用33pF電容。電容的作用還在于能夠容易起震并減少頻率的溫漂。
單片機(jī)的復(fù)位一般情況下都是靠外部電路鏈接來(lái)實(shí)現(xiàn)的,在時(shí)鐘電路工作之后,僅僅需要在單片機(jī)的RST引腳上出現(xiàn)高于24個(gè)時(shí)鐘振蕩脈沖(相當(dāng)于2個(gè)機(jī)器周期)以上的高電平,這樣的單片機(jī)便能夠?qū)崿F(xiàn)初始化狀態(tài)復(fù)位。為了能夠保證應(yīng)用系統(tǒng)能夠可靠正常的復(fù)位,在設(shè)計(jì)復(fù)位電路的時(shí)候,通常使RST引腳保持10ms以上的高電平的水平。只要保持高電平的狀態(tài),那么單片機(jī)就能夠?qū)崿F(xiàn)循環(huán)復(fù)位;當(dāng)RST從高電平順利地轉(zhuǎn)變?yōu)榈碗娖揭院螅珹T89C51單片機(jī)從0000H地址開始執(zhí)行程序。
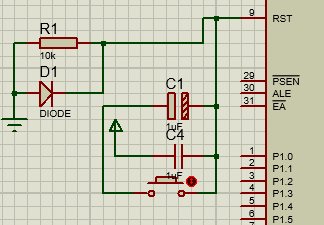
圖3復(fù)位電路
它的工作原理在于當(dāng)電源接通,上電瞬間,電源對(duì)C1進(jìn)行充電,此時(shí)復(fù)位引腳9即RST高電平有效,隨著時(shí)間推移,RST電平下降,此時(shí)轉(zhuǎn)為單片機(jī)正常工作。一般情況下復(fù)位時(shí)間為3~5個(gè)的RC時(shí)間。
按鍵開關(guān)的使用是為了避免死機(jī)狀態(tài)下能夠正常復(fù)位。而設(shè)置并聯(lián)電容C3(這里也可以選擇串聯(lián)一個(gè)遠(yuǎn)小于R1的電阻可以達(dá)到一樣的效果)是為了限制按下瞬間電容C1的電流,避免產(chǎn)生火花,以達(dá)到保護(hù)按鍵開關(guān)的目的。RC復(fù)位電路的復(fù)位電路增加了二極管,在電源電壓瞬間下降時(shí)使電容迅速放電,一定寬度的電源毛刺也可令系統(tǒng)可靠復(fù)位。
3、信號(hào)輸入
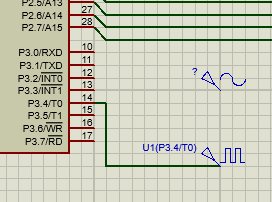
圖4 信號(hào)輸入
如圖4所示,信號(hào)從單片機(jī)P3.4/T0口輸入。
采用7SEG-MPX8-CC-BLUE,里面有八個(gè)數(shù)碼管的顯示電路,這里只用到6個(gè)。
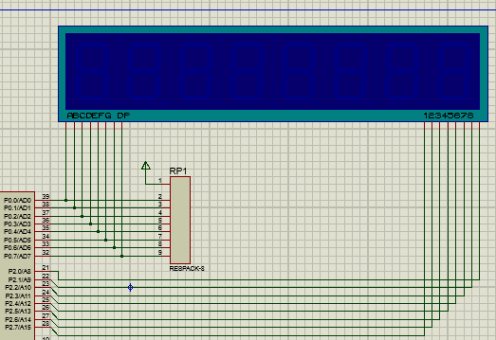
圖5 顯示電路
我們知道共陰和共陽(yáng)結(jié)構(gòu)的LED顯示器各筆劃的段名和安排的位置是相同的。當(dāng)其中的二極管導(dǎo)通時(shí),相應(yīng)的筆劃部分會(huì)發(fā)亮,由發(fā)亮的筆劃段組合而顯示的各種字符。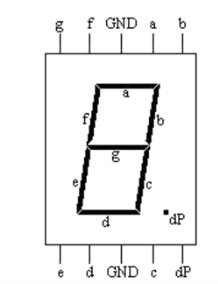
圖6 數(shù)碼管顯示電路
其中的8個(gè)筆劃段a、b、c、d、e、f、g、dP對(duì)應(yīng)于一個(gè)字節(jié)(8位)的D0、D1、D2、D3、D4、D5、D6、D7。如下表1.1,用LED顯示器顯示十進(jìn)制轉(zhuǎn)換成十六進(jìn)制數(shù)的字形代碼如下所示:

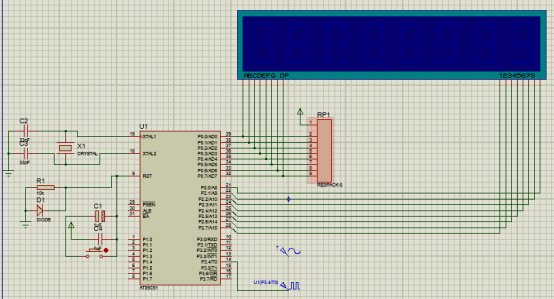
圖7 整體電路



(一)性能指標(biāo)
頻率范圍:0~1MHz; 頻率分辨率1.010x10^-6,輸出范圍:0~990KHz
分析:當(dāng)輸入達(dá)990KHz以上,LED顯示值存在特別大誤差,故輸入值不可過(guò)高。
(二)典型值及誤差分析
分析:由表格明顯看出,
1、隨著輸入頻率值變大,測(cè)量絕對(duì)誤差就越大;輸入值越小,絕對(duì)誤差越小。
2、當(dāng)輸入值從0至100KHz變化時(shí),測(cè)量相對(duì)誤差逐漸變大;輸入值從100KHz至700KHz變化時(shí),測(cè)量相對(duì)誤差逐漸變小,隨后又逐漸變大因而輸入值在700KHz附近存在最佳測(cè)量點(diǎn)。
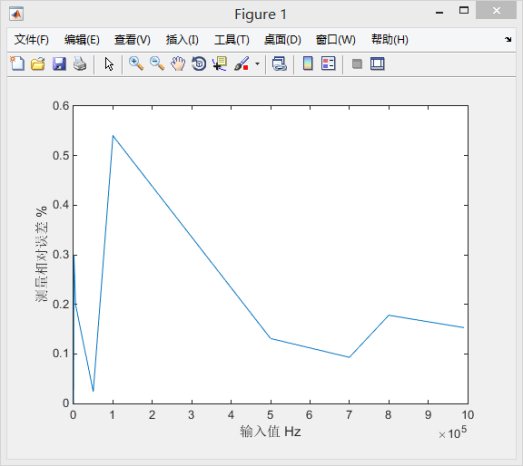
圖8 誤差曲線
分析:當(dāng)輸入值從0至100KHz變化時(shí),測(cè)量相對(duì)誤差很快變大;輸入值從100KHz至700KHz變化時(shí),測(cè)量相對(duì)誤差逐漸變小,隨后又逐漸變大。因而輸入值在700KHz附近存在最佳測(cè)量點(diǎn)。
(四)仿真結(jié)果截圖

圖9 輸入值為500000Hz時(shí)的測(cè)量值
分析:此時(shí)測(cè)量相對(duì)誤差為0.139%

圖10 輸入值為5000Hz時(shí)的測(cè)量值
分析:此時(shí)測(cè)量相對(duì)誤差為0.22%
圖11 輸入值為500Hz時(shí)的測(cè)量值
分析:此時(shí)測(cè)量相對(duì)誤差為0

圖12 輸入值為5Hz時(shí)的測(cè)量值
分析:此時(shí)測(cè)量相對(duì)誤差為0.
本次實(shí)驗(yàn)使用的仿真軟件是Keil和Proteus結(jié)合,測(cè)量結(jié)果分析采用的是matlab。
遇到的問(wèn)題有:
1、Proteus的安裝問(wèn)題
- Proteus 的基本操作如找元件并放置在圖板里
- Keil和Proteus的聯(lián)調(diào)問(wèn)題
解決:1、安裝問(wèn)題通過(guò)詢問(wèn)學(xué)長(zhǎng)獲知正確破解方法
- 基本操作問(wèn)題通過(guò)自行網(wǎng)上搜索得知
- 聯(lián)調(diào)問(wèn)題是自己從各方面尋求解決辦法得以解決
通過(guò)本次實(shí)驗(yàn)達(dá)到了實(shí)驗(yàn)?zāi)康?/font>
1、理解電子計(jì)數(shù)器的工作原理。
2、掌握電子計(jì)數(shù)器各個(gè)組成部分的實(shí)現(xiàn)方法。
明白平時(shí)要注重理論學(xué)習(xí)與實(shí)踐的結(jié)合,才能學(xué)得很深刻,更到位。








