������Ƭ�C(j��)�ij��F(xi��n)�������˂���������Ԇ�Ƭ�C(j��)��ʹ��Ҳʹ�������·���Ӻ��κ͌�(sh��)�á����ǂ��y(t��ng)���������������}�д���Q��
- �еĂ��y(t��ng)�������ɔ�(sh��)���·�M�ɣ���ʹ�ìF(xi��n)�����ж����x�ֻ����F(tu��n)���ӱ�ِ�����ԕ���ɲ��������韩���F(xi��n)�������^�Ȇ��}��
- ���ڂ��y(t��ng)�����������Ԫ���������������ɣ����ԕ���ɿɿ��Եͣ�Ԫ�������ɹ�ˇ��(f��)�s�����M(f��i)���^�ߵ��韩��
3�����ڂ��y(t��ng)�������ɔ�(sh��)���·��(g��u)�ɣ����Կ�����ɓ���r(sh��)���Ʋ����_�����܆�һ��ȱ�ݡ�
�S���ƌW(xu��)���g(sh��)�İl(f��)չ���ռ�,���N���ӵĸ�ِԽ��Խ�࣬ ���Г�����������Ҳ���@����Ҋ������O(sh��)Ӌ(j��)һ�N������ʹ�úͅ^(q��)�ֶȸߵē��������˷dz����е��΄�(w��)�� �F(xi��n)�چ�Ƭ�C(j��)���M(j��n)�����(g��)�I(l��ng)��,���书��С�����ܻ������Q�����ԁ����Æ�Ƭ�C(j��)���O(sh��)Ӌ(j��)��������ʹ���φ��}���Խ�Q��ᘌ�������r, ���n��ͨ�^Keilcܛ�����̣�Protuesܛ�����棬�O(sh��)Ӌ(j��)����AT89C51��Ƭ�C(j��)����ĵİ�λ���������c����(sh��)�a�ܡ����Q����ͨ�^����ӿڌ�(sh��)�F(xi��n)�İ�·�����������Æ�Ƭ�C(j��)���ӕr(sh��)�·�����I��(f��)λ�·���r(sh��)��·�����r(sh��)��/Ӌ(j��)��(sh��)���ȣ��O(sh��)Ӌ(j��)��·���������H���Ќ�(sh��)�r(sh��)�@ʾ�x�ֵ�̖�a�͓���r(sh��)�g�Ĺ��ܣ�ͬ�r(sh��)߀���ÅR���Z�ԣ�ʹ�䌍(sh��)�F(xi��n)��(f��)λ�����r(sh��)�͈�(b��o)�����ܡ������O(sh��)Ӌ(j��)��ϵ�y(t��ng)��(sh��)���ԏ�(qi��ng)���������Σ��U(ku��)չ����(qi��ng)��
1 �O(sh��)Ӌ(j��)����1.1�n�}�������N֪�R��ِ���Ċʻ�ӵďV���_չ,ʹ���������˱ز����ٵ�����O(sh��)��,���酢ِ�x���ṩ�˹��������^�����ٵIJÛQ,����u�l(f��)չ�ɞ�һ�N���͵���Ӯa(ch��n)Ʒ,�����������ۓ������r(ji��)��һ���^�F�Ҷ���СҎ(gu��)ģ�����·��(g��u)��,�����܆�һ,���������������롣���Ľ�B��ͨ�^Keilcܛ�����̣���Protuesܛ�����棬ģ�M��һ�N��AT89C51��Ƭ�C(j��)����ĵ����ܓ�����,����������ˆ�Ƭ�C(j��)ϵ�y(t��ng)�ă�(y��u)�c(di��n),���нY(ji��)��(g��u)���Ρ�����(qi��ng)�ɿ��Ժá��ɱ��^�͵����c(di��n)�����ܸ���(j��)��ͬ�ē���ݔ����̖,��(j��ng)�^��Ƭ�C(j��)�Ŀ���̎�����a(ch��n)����ͬ���cݔ����̖������(y��ng)��ݔ����̖,���ͨ�^Һ���@ʾ���@ʾ����(y��ng)��·��(sh��)�ʹ��}�r(sh��)�g�ȡ�
1.2�O(sh��)Ӌ(j��)Ҫ�����O(sh��)Ӌ(j��)��Ҫ�ǽ�B�ˆ�Ƭ�C(j��)�����µİ�·���ܓ�����ϵ�y(t��ng)��Ԕ��(x��)��B����Ӳ����ܛ���O(sh��)Ӌ(j��)�������������ģ�K����Ԕ��(x��)��B������Ҫ���ܺ�ָ��(bi��o)���£�
(1)ͬ�r(sh��)��8���x�ֻ�8��(g��)�����(du��)��ِ���քe��8��(g��)���o��ʾ��
(2)�O(sh��)��ϵ�y(t��ng)����_�P(gu��n)S�͓�������_�P(gu��n)S��ԓ�_�P(gu��n)�������˿��ơ�
(3)�����������i���c�@ʾ���ܡ����x�ְ��Ӱ��o���i������(y��ng)�ľ�̖�����ڔ�(sh��)�a�����@ʾ�x��̖�a�����҃�(y��u)�ȓ����x�ֵľ�̖һֱ���ֵ������ˌ�ϵ�y(t��ng)�����ֹ��
(4)���������ж��r(sh��)�����ܣ���һ�Γ���ĕr(sh��)�g���������O(sh��)����
(5)��(d��ng)�����ˆ��ӡ��_ʼ���I���r(sh��)���M(j��n)�МpӋ(j��)�r(sh��)����ِ�x�����O(sh��)���ĕr(sh��)�g��(n��i)�M(j��n)�Г��𣬓�����Ч�����r(sh��)��ֹͣ�������@ʾ�����@ʾ�x�ֵľ�̖�͓���ĕr(sh��)�g�������ֵ������ˌ�ϵ�y(t��ng)�����ֹ��������r(sh��)�r(sh��)�g�ѵ����o�˓��𣬱��Γ���oЧ�����r(sh��)�@ʾ�����@ʾ00��
2 8λ��ِ������ϵ�y(t��ng)����
2.1ϵ�y(t��ng)�O(sh��)Ӌ(j��)ԭ��
ԓ������ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)���Ԇ�Ƭ�C(j��)�����Ŀ���ģ�K������ģ�K���O(sh��)Ӌ(j��)�İ�·�������������Ă�(g��)ģ�K���քe�飺���Iݔ��ģ�K���@ʾģ�K���r(sh��)��c��(f��)λģ�K�����Ŀ���ģ�K��
2.2ϵ�y(t��ng)�M�����Iݔ��ģ�K����10��(g��)���I���֞铌���I�Ϳ��ư��I�������I���а˂�(g��)���քe��S0�DS7���������x���M(j��n)�Г���ʹ�ã�P1.0-P1.7�ڞ�˂�(g��)���I������̖��ݔ��ڣ����ƽ��Ч�����ư��I��2��(g��)���քe��S8�cS9,S8��S9�քe�顰���/�O(sh��)�Õr(sh��)�g���͡��_ʼ�I���� �䌦��(y��ng)��I�MO�ӿڷ�P2.0�cP2.1
�@ʾģ�K��ϵ�y(t��ng)�����߶Δ�(sh��)�a���@ʾ�����x�ּ��r(sh��)�g��
�r(sh��)��c��(f��)λģ�K�����r(sh��)��·�͏�(f��)λ�·����Ƭ�C(j��)����Сϵ�y(t��ng)�����ɕr(sh��)��·����(f��)λ�·���Դ�·����Ƭ�C(j��)��(g��u)�ɡ���Ƭ�C(j��)�ĕr(sh��)���̖�Á��ṩ��Ƭ�C(j��)Ƭ��(n��i)���N�����ĕr(sh��)�g����(zh��n)����Ƭ�C(j��)�ĕr(sh��)���̖ͨ���ÃɷN�·��ʽ�õ�����(n��i)����ʎ��ʽ���ⲿ��ʎ��ʽ����(f��)λ�����tʹ��Ƭ�C(j��)��Ƭ��(n��i)�·��ʼ����ʹ��Ƭ�C(j��)��һ�N�_���ij��B(t��i)�_ʼ�\(y��n)�С�����(j��)��(y��ng)�õ�Ҫ��(f��)λ����ͨ���ЃɷN������ʽ����늏�(f��)λ���_�P(gu��n)��(f��)λ����(d��ng)5lϵ�І�Ƭ�C(j��)�ď�(f��)λ���_RST(ȫ�QRESET)���F(xi��n)2��(g��)�C(j��)���������ϵĸ��ƽ�r(sh��)����Ƭ�C(j��)�͈�(zh��)�Џ�(f��)λ���������RST���m(x��)����ƽ����Ƭ�C(j��)��̎��ѭ�h(hu��n)��(f��)λ��B(t��i)��
���Ŀ���ģ�K�����˂����^��CPU����������(g��)ϵ�y(t��ng)�Ŀ����Ʋ��֣���ϵ�y(t��ng)�ĺ��Ŀ���ģ�K��51ϵ�еĆ�Ƭ�C(j��)��ֻ���҂�ͨ�^ܛ������ľ�������������?q��)����Ƭ�C(j��)��ԓϵ�y(t��ng)�ŕ����_�Ĺ�����
3 ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)3.1���������x�����������x���Ƭ�C(j��)���x��Ƭ�C(j��)��(sh��)�H�Ͼ��ǰ�CPU��RAM��ROM�����r(sh��)��/Ӌ(j��)��(sh��)����I/O�ӿ��·���͙C(j��)����Ҫ����������һ�KоƬ�ϣ���˷Q֮���Ƭ�C(j��)��
AT89C51��Ƭ�C(j��)���飺
AT89C51��Ƭ�C(j��)��Ҫ�����²�����(g��u)�ɣ���λ̎����CPU����ʎ�·���������Ʋ������Д���Ʋ�����Ƭ��(n��i)Flash�惦����Ƭ��(n��i)RAM������I/O�ӿڡ����r(sh��)���ʹ���I/O�ӿڡ�AT89C51��Ƭ�C(j��)��(n��i)����CPU��4KB��FPEROM ��128B��RAM���ɂ�(g��)16λ�Ķ��r(sh��)/Ӌ(j��)��(sh��)��T0��T1��4��(g��)8λ��I/O��P0��P1��P2��P3�ȽM�ɡ���Ƭ�C(j��)��(n��i)������ĵIJ�����CPU��CPU���书�ܿɷ֞��\(y��n)�����Ϳ������ɲ��֡��������ɳ���Ӌ(j��)��(sh��)��PC��ָ�������ָ���g�a������(sh��)�r(sh��)�����c�l���D(zhu��n)��߉�·�ȽM�ɡ����Ĺ����nj����Դ惦���е�ָ���M(j��n)���g�a��ͨ�^��(sh��)�r(sh��)�����·����Ҏ(gu��)���ĕr(sh��)�̰l(f��)�����N��������ă�(n��i)�����ⲿ�Ŀ�����̖��ʹ�����օf(xi��)�{(di��o)���������ָ����Ҏ(gu��)���IJ������\(y��n)���������g(sh��)߉������ALU���ۼ���ACC���������������B(t��i)�ּĴ���PSW��BCD�a�\(y��n)���{(di��o)���·�ȽM�ɡ�������ߔ�(sh��)��(j��)̎����λ�������ܣ�Ƭ��(n��i)������һ��(g��)ͨ�üĴ���B��һЩ���üĴ�����߀������λ̎��߉�·�Ĺ��ܡ�
AT89C51���_�D��D3-1��ʾ��
�D3-1 ���_�D
P0�ڣ�P0�ڞ�һ��(g��)8λ©���_·�p��I/O�ڣ�ÿ�_������8��(g��)TTL�T�������(d��ng)P1�ڵĹ��_��һ�Ό�1�r(sh��)�������x�����ݔ�롣P0�܉������ⲿ����(sh��)��(j��)�惦���������Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ����FIASH���̕r(sh��)��P0 ������ԭ�aݔ��ڣ���(d��ng)FIASH�M(j��n)��У�(y��n)�r(sh��)��P0ݔ��ԭ�a���˕r(sh��)P0�ⲿ��횱����ߡ�
P1�ڣ�P1����һ��(g��)��(n��i)���ṩ��������8λ�p��I/O�ڣ�P1�ھ��_���ܽ���ݔ��4TTL�T�����P1�ڹ��_����1����(n��i)��������ߣ�������ݔ�룬P1�ڱ��ⲿ��������ƽ�r(sh��)����ݔ��������@�����ڃ�(n��i)�������ľ��ʡ���FLASH���̺�У�(y��n)�r(sh��)��P1������ڰ�λ��ַ���ա�
P2�ڣ�P2�ڞ�һ��(g��)��(n��i)����������8λ�p��I/O�ڣ�P2�ھ��_���ɽ��գ�ݔ��4��(g��)TTL�T�������(d��ng)P2�ڱ�����1���r(sh��)������_����(n��i)������������ߣ�������ݔ�롣���������ݔ��r(sh��)��P2�ڵĹ��_���ⲿ���ͣ���ݔ��������@�����ڃ�(n��i)�������ľ��ʡ�P2�ڮ�(d��ng)�����ⲿ����惦����16λ��ַ�ⲿ��(sh��)��(j��)�惦���M(j��n)�д�ȡ�r(sh��)��P2��ݔ����ַ�ĸ߰�λ���ڽo����ַ��1���r(sh��)�������Ã�(n��i)��������(y��u)�ݣ���(d��ng)���ⲿ��λ��ַ��(sh��)��(j��)�惦���M(j��n)���x���r(sh��)��P2��ݔ��������ܼĴ����ă�(n��i)�ݡ�P2����FLASH���̺�У�(y��n)�r(sh��)���ո߰�λ��ַ��̖�Ϳ�����̖��
P3�ڣ�P3�ڹ��_��8��(g��)����(n��i)�����������p��I/O�ڣ��ɽ���ݔ��4��(g��)TTL�T�������(d��ng)P3�ڌ��롰1������������(n��i)����������ƽ��������ݔ�롣����ݔ�룬�����ⲿ��������ƽ��P3�ڌ�ݔ�������ILL���@�����������ľ��ʡ�P3��Ҳ������AT89C51��һЩ����ܿڣ�ͬ�r(sh��)���W�q���̺;���У�(y��n)����һЩ������̖��
RST����(f��)λݔ�롣��(d��ng)��ʎ����(f��)λ�����r(sh��)��Ҫ����RST�_�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�g��
ALE�MP����(d��ng)�L���ⲿ�惦���r(sh��)����ַ�i�����S��ݔ���ƽ�����i���ַ�ĵ�λ�ֹ�(ji��)����FLASH�������g�������_����ݔ�뾎���}�_����ƽ�r(sh��)��ALE���Բ�׃���l������ݔ�����}�_��̖�����l�ʞ���ʎ���l�ʵ�1/6����������������ⲿݔ�����}�_�����ڶ��r(sh��)Ŀ�ġ�
PSEN���ⲿ����惦�����xͨ��̖�������ⲿ����惦��ȡָ���g��ÿ��(g��)�C(j��)�����ڃɴ�PSEN��Ч�������L���ⲿ��(sh��)��(j��)�惦���r(sh��)���@�ɴ���Ч��PSEN��̖�������F(xi��n)��
EA/VPP����(d��ng)���ֵ��ƽ�r(sh��)���t�ڴ����g�ⲿ����惦����0000H-FFFFH���������Ƿ��Ѓ�(n��i)������惦����ע����ܷ�ʽ1�r(sh��)��EA/VPP����(n��i)���i����RESET����(d��ng)EA/VPP�˱��ָ��ƽ�r(sh��)�����g��(n��i)������惦������FLASH�������g�������_Ҳ����ʩ��12V�����Դ��VPP����
XTAL1��������ʎ�Ŵ�����ݔ�뼰��(n��i)���r(sh��)犹����·��ݔ�롣
XTAL2�����Է�����ʎ����ݔ����
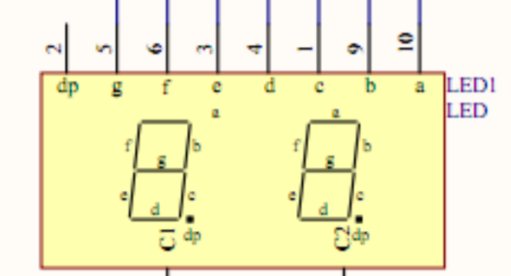
3.2 ��(sh��)�a�܄ӑB(t��i)�@ʾ�·�چ�Ƭ�C(j��)�đ�(y��ng)��ϵ�y(t��ng)�У��@ʾ�����Ҋ��ݔ���O(sh��)�䣬Ҳ���˙C(j��)��Ԓ�ز����ٵIJ��֡��@ʾ�������@ʾ��ʽ�֞�ֶ�ʽ�@ʾ�����c(di��n)�ʽ�@ʾ���͗l�D��������ʽ�@ʾ�����@ʾ�������ڔ�(sh��)�֡���̖�����֡��D�κ����@ʾ���߶Δ�(sh��)�a���@ʾ���dž�Ƭ�C(j��)�_�l(f��)�г��õ�ݔ�����������������ɂ�(g��)�l(f��)����O�ܽM�ɵģ���(d��ng)�l(f��)����O�܌�(d��o)ͨ�r(sh��)������(y��ng)��һ��(g��)�c(di��n)��һ��(g��)�P���l(f��)�������Ʋ�ͬ�M�ϵĶ��O�܌�(d��o)ͨ�������@ʾ�����N�ַ��� ���õ�LED�@ʾ����7��ʽ�͡��ס��ֶ�֮�֣�7�ֶΆ�(g��)��(sh��)�a�܃�(n��i)���а�ֻ�l(f��)����O�ܣ�7ֻ���ֶΣ��ɽM�����Σ��ڰ˂�(g��)��С��(sh��)�c(di��n)���ʆ�(g��)�����˷Q��7�Δ�(sh��)�a���@ʾ��Ҳ���˷Q��8���@ʾ��7�Δ�(sh��)�a�@ʾ�܃�(n��i)���Y(ji��)��(g��u)��D3-2��ʾ��
�D3-2 ��(n��i)���Y(ji��)��(g��u)�D
�@ʾ�����γߴ���D3-3��ʾ��
�D3-3�@ʾ�������γߴ�
�@ʾģ�K�·�B�ӈD��D3-4��ʾ��
�D3-4�@ʾģ�K�·�B�ӈD
3.3 8λ��ِ�������c��Ƭ�C(j��)�Ľӿ��·�D AT89C51��Ƭ�C(j��)P1.0~P1.7�˿ڷքe�cS0~S7���o���B����(y��ng)8��(g��)��ͬ���x�ֵē����I���x��ͨ�^�����I�M(j��n)�Г��𣬆�Ƭ�C(j��)������̖���(n��i)���M(j��n)��̎�������@ʾ�����@ʾ�x�־�̖����(n��i)���M(j��n)���i�档��D3-5��ʾ��
�D3-5 8λ��ِ�������c��Ƭ�C(j��)�Ľӿ��·�D
3.4�r(sh��)��·
��Ƭ�C(j��)����ڕr(sh��)犵��(q��)���²��ܹ�����AT89C51��Ƭ�C(j��)�ĕr(sh��)犮a(ch��n)�������ЃɷN����(n��i)���r(sh��)犷�ʽ���ⲿ�r(sh��)犷�ʽ���oՓ�ηN��ʽ������Ҫ�ⲿ�����·���a(ch��n)���r(sh��)��}�_��
�ⲿ�r(sh��)犷�ʽ����ֱ�ӌ��ⲿ����ʎ�}�_ͨ�^XTALl��XTAL2�����Ƭ�C(j��)���ⲿ�r(sh��)犷�ʽ�����ڶ��C(j��)ϵ�y(t��ng)���Ա����(g��)��Ƭ�C(j��)�܉�ͬ�r(sh��)���������ⲿ��ʎ��̖�o����Ҫ���豣�C�}�_���Ȳ�С��20ns�����l�ʑ�(y��ng)���چ�Ƭ�C(j��)��֧�ֵ�����l�ʡ�
��(n��i)���r(sh��)犷�ʽ�������Æ�Ƭ�C(j��)оƬ��(n��i)������ʎ����ͨ�^�����_XTALl��XTAL2�ɶ˿�Ӿ��w��ʎ������(g��u)�ɷ�(w��n)�����Լ���ʎ���ķ��������ɫ@�õ��Լ���ʎ���l(f��)����(w��n)�����}�_��ֱ������оƬ��(n��i)���ĕr(sh��)��·�ķ�ʽ����ӵľ��w��ʎ������ѽ�(j��ng)���t����XTAL2���_��ݔ��һ����ֵ�����Ҳ����Լ���ʎ�����l��ȡ�Q�ھ��w��ʎ�����l�ʣ���Ҋ�ľ��w��ʎ���l����6MHz��12MHz��AT89C52��Ƭ�C(j��)�ĕr(sh��)��l����߿ɞ�24Mz��
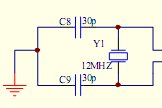
��ϵ�y(t��ng)�в��õ��ǃ�(n��i)���r(sh��)犷�ʽ���r(sh��)��·��D3-6��ʾ��
�D3-6�r(sh��)��·�D
�ĕr(sh��)��·��ʾ��D�п��Կ�������Ƭ�C(j��)����ӵľ��w��ʎ����߅߀�Ѓɂ�(g��)�����C8��C9��C8��C9���Q���C����ݣ���Ҫ�����Ѓ��c(di��n)��һ�ǿ��Դ�ʹ��Ƭ�C(j��)ϵ�y(t��ng)����������C8��C9���Ќ��l���M(j��n)���{(di��o)���ã������چ�Ƭ�C(j��)ϵ�y(t��ng)��ʎ�l�ʵķ�(w��n)�����S�ֆ�Ƭ�C(j��)�������\(y��n)�С��C����ݵ���ֵ�x���c���õľ��w��ʎ�����l��ֵ���P(gu��n)�����w��ʎ������ʎ�l��Խ�ߣ�����(y��ng)���C����ݵ���ֵҲҪ��ߡ����������ϵĺã����l(f��)�]�C����ݵķe�O���á���֮���Լ���ʎ���l�ʵķ�(w��n)���Ԍ��ܵ�Ӱ푡���(j��ng)�^�����Č�(sh��)�H��(y��ng)�ã����w��ʎ�����l���c�C����ݵ���ֵ֮�g�γ���һ���Ĺ̶����䡣���磺��(d��ng)���w��ʎ�����l�ʞ�12MHz�r(sh��)���C����ݵ���ֵһ���30pF���ҡ�
�_��ϵ�y(t��ng)�о��w��ʎ�����l�ʣ����J(r��n)���c���w�đ�(y��ng)�����P(gu��n)����Փ�Ϯ�(d��ng)Ȼϣ����Ƭ�C(j��)���\(y��n)���ٶ�Խ��Խ�ã������w��ʎ�����l��Խ��Խ�á����ǣ�����Щ��r�£���Ƭ�C(j��)������O(sh��)����ٶȟo��ƥ���Ƭ�C(j��)���\(y��n)���ٶȡ����˹�(ji��)�s�ɱ��������x����ʎ�l���^�͵ľ��w��ʎ���������@�N���]�������еľ��w��ʎ�l���O(sh��)Ӌ(j��)��12MHz���C����ݵ���ֵ�x����30pF��
��Ƭ�C(j��)�ڹ����r(sh��)���Ƀ�(n��i)����ʎ���a(ch��n)��������ֱ��ݔ���������(n��i)������߉��Ԫ�ĕr(sh��)���̖�����ڷQ��r(sh��)����ڡ����С�Ǖr(sh��)���̖�l�ʵĵ���(sh��)������T=1/fosc��ʾ���D�Еr(sh��)��l�ʞ�12MHz����fosc=12MHz���t�r(sh��)����ڞ�1/12µs�����·�ڼ�늴�s���t10ms����ʎ��������XTAL2���_�a(ch��n)�����Ȟ�3V���ҵ����Ҳ��r(sh��)���̖��
���˜pС������ݣ����õر��C��ʎ����(w��n)�����ɿ��ع��������O(sh��)Ӌ(j��)�·��r(sh��)�����w��ʎ�����C����ݵ�λ�Ñ�(y��ng)�M���ܵؿ�����Ƭ�C(j��)��XTALl��XTAL2���_ ��
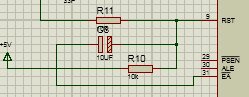
3.5��(f��)�
ʹCPU�M(j��n)���ʼ��B(t��i)����0000H��ַ�_ʼ��(zh��)�г�����^�̽�ϵ�y(t��ng)��(f��)λ����Ƭ�C(j��)���������Ԅ��M(j��n)�Џ�(f��)λ������������(y��ng)���ⲿ��(f��)λ�·���܌�(sh��)�F(xi��n)���Č�(sh��)�F(xi��n)ϵ�y(t��ng)��(f��)λ�ķ���������ϵ�y(t��ng)��(f��)λ�ɷ֞�Ӳ����(f��)λ��ܛ����(f��)λ��
Ӳ����(f��)λ���ͨ�^CPU�ⲿ��Ӳ���·�oCPU��RESET�˼������r(sh��)�g�ĸ��λ���܌�(sh��)�F(xi��n)����늏�(f��)λ���˹����o��(f��)λ��Ӳ�����T����(f��)λ����Ӳ����(f��)λ��Ӳ����(f��)λ�����üĴ����Ġ�B(t��i)������ʼ�����Ҍ�Ƭ��(n��i)ͨ�üĴ����ă�(n��i)�ݛ]��Ӱ푡����ǣ�Ӳ����(f��)λ߀���Ԅ�����Д༤���(bi��o)־��ʹ�Д�ϵ�y(t��ng)�܉������������@��һ��(g��)��(sh��)�s���מ鲻�پ��a�ˆT����ҕ��
ܛ����(f��)λ������һϵ��ָ���ģ�MӲ����(f��)λ���ܣ����ͨ�^�D(zhu��n)��ָ��ʹ�����0000H��ַ�_ʼ��(zh��)�С��������üĴ����ď�(f��)λ���������ģ�Ҳ�]�б�Ҫ��ȫģ�M���ɸ���(j��)��(sh��)�H��Ҫȥ�������ʼ���^������ɡ������Д༤���(bi��o)־��������������z������?y��n)����]�����_��λ��ַ�ɹ����̡��еľ����ˆT��020000��LJMP 0000H������ܛ�����壬�J(r��n)��ֱ���D(zhu��n)��0000H��ַ�������ܛ����(f��)λ�������@��e(cu��)�`�ĵ��ʹ�����ܛ����(f��)λ��ʹ��ܛ�������ܛ�����T�������M(j��n)�еĹ������@�r(sh��)������e(cu��)��ȫ�п��ܰl(f��)�����Д��ӳ����У��Д༤���(bi��o)־����λ��������ֹͬ���Д�푑�(y��ng)������ܛ�����T�Ǹ��Д࣬������ֹ�fҪ�Д�푑�(y��ng)���ɴ˿�Ҋ����Д༤���(bi��o)־����Ҫ�ԡ�
��Ƭ�C(j��)ϵ�y(t��ng)�چ����\(y��n)�Еr(sh��)��������ɵď�(f��)λ����������늏�(f��)λ����Ŀ����ʹCPU��ϵ�y(t��ng)������������̎��һ��(g��)�_���ij�ʼ��B(t��i)�������@��(g��)��B(t��i)�_ʼ��������(f��)λ����Ҫ����Ƭ�C(j��)�ж�N��(f��)λ��ʽ���@��H��B��늏�(f��)λ�Ͱ��I��(f��)λ�@�ɷN���õď�(f��)λ��ʽ��
��늏�(f��)λ���õķ�����ʹ�������������������ij�������_(d��)���M���ͨ�Դ��Ƭ�C(j��)��(sh��)�F(xi��n)�Ԅӏ�(f��)λ��Ҫ��
��Ƭ�C(j��)�ĵ�9�_RST��Ӳ����(f��)λ�ˣ�ֻҪ��ԓ�˳��m(x��)4��(g��)�C(j��)�����ڵĸ��ƽ���Ɍ�(sh��)�F(xi��n)��(f��)λ����(f��)λ���Ƭ�C(j��)�ĸ���B(t��i)���֏�(f��)����ʼ����B(t��i)�����·�D��D3-7��ʾ��
�D3-7��(f��)�
���·�D�У���ݵĵĴ�С��10uF�����Ĵ�С��10k�����Ը���(j��)��ʽ�����������ݳ�늵��Դ늉���0.7����3.5V������Ҫ�ĕr(sh��)�g��10K*10uF=0.1S��Ҳ�����f����X���ӵ�0.1S��(n��i)����݃ɶ˵�늉��r(sh��)��0-3.5V���ӡ��@��(g��)�r(sh��)��10K���ɶ˵�늉����5-1.5V�p�٣���(li��n)�·��̎늉�֮�͞鿂늉�����������0.1S��(n��i)��RST���_�����յ���늉���5V-1.5V����5V����������52��Ƭ�C(j��)��С��1.5V��늉���̖����ƽ��̖��������1.5V��늉���̖����ƽ��̖���������_�C(j��)0.1S��(n��i)����Ƭ�C(j��)ϵ�y(t��ng)�Ԅӏ�(f��)λ��RST���_���յ��ĸ��ƽ��̖�r(sh��)�g��0.1S���ң���
�چ�Ƭ�C(j��)����0.1S�����C�ɶ˵�늉����m(x��)��늞�5V���@�Ǖr(sh��)��10K���ɶ˵�늉��ӽ���0V��RST̎�ڵ��ƽ����ϵ�y(t��ng)������������(d��ng)���I���µĕr(sh��)���_�P(gu��n)��(d��o)ͨ���@��(g��)�r(sh��)����݃ɶ��γ���һ��(g��)��·����ݱ���·�������ڰ��I���µ��@��(g��)�^���У�����_ʼጷ�֮ǰ���������S���r(sh��)�g�����ƣ���ݵ�늉���0.1S��(n��i)����5Vጷŵ�׃?y��u)��?.5V��������С������(j��)��(li��n)�·늉����֮̎�ͣ��@��(g��)�r(sh��)��10K���ɶ˵�늉���3.5V��������������RST���_�ֽ��յ����ƽ����Ƭ�C(j��)ϵ�y(t��ng)�Ԅӏ�(f��)λ��
��(f��)λ�·��ԭ���dž�Ƭ�C(j��)RST���_���յ�2uS���ϵ��ƽ��̖��ֻҪ���C��ݵij��늕r(sh��)�g����2uS�����Ɍ�(sh��)�F(xi��n)��(f��)λ�������·�е����ֵ�ǿ��Ը�׃�ġ�ֵ��ע����ǣ����O(sh��)Ӌ(j��)��(d��ng)��ʹ�õ���Ӳ����(f��)λ��ܛ����(f��)λ�ɷN���ܣ�ܛ��(f��)λ��(sh��)�H�Ͼ��Ǯ�(d��ng)�����(zh��)���ꮅ֮������ָ�ͨ�^һ�l���D(zhu��n)ָ�������D(zhu��n)�������(zh��)�е���ʼ��ַ��
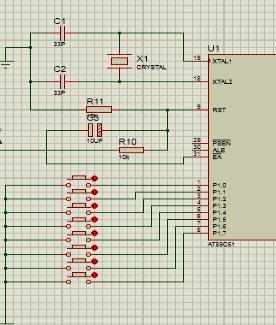
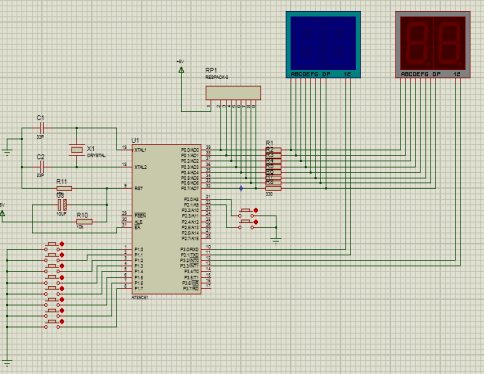
3.6ϵ�y(t��ng)���w�·�D
ϵ�y(t��ng)���w�·�D��D3-8��ʾ��
���O(sh��)Ӌ(j��)��Ҫ�ǽ�B�ˆ�Ƭ�C(j��)�����µ�8·��ِ������ϵ�y(t��ng)��ͬ�r(sh��)��8���x�ֻ�8��(g��)�����(du��)��ِ���քe��8��(g��)���oS0~ S7��ʾ���O(sh��)��һ��(g��)ϵ�y(t��ng)����͓�������_�P(gu��n)S��ԓ�_�P(gu��n)�������˿��ơ������������i���c�@ʾ���ܡ����x�ְ��Ӱ��o���i������(y��ng)�ľ�̖�����ڔ�(sh��)�a�����@ʾ�x��̖�a�����҃�(y��u)�ȓ����x�ֵľ�̖һֱ���ֵ������ˌ�ϵ�y(t��ng)�����ֹ�����������ж��r(sh��)�����ܣ���һ�Γ���ĕr(sh��)�g���������O(sh��)�������籾��ԇ�(y��n)�O(sh��)����50s����(d��ng)�����ˆ��ӡ��_ʼ���I���r(sh��)���M(j��n)�МpӋ(j��)�r(sh��)��ͬ�r(sh��)�P(y��ng)���l(f��)���̕���푣�푳��m(x��)�ĕr(sh��)�g��0.5s���ҡ���ِ�x�����O(sh��)���ĕr(sh��)�g��(n��i)�M(j��n)�Г��𣬓�����Ч�����r(sh��)��ֹͣ�������@ʾ�����@ʾ�x�ֵľ�̖�͓���ĕr(sh��)�g�������ֵ������ˌ�ϵ�y(t��ng)�����ֹ��������r(sh��)�r(sh��)�g�ѵ����o�˓��𣬱��Γ���oЧ��ϵ�y(t��ng)��(b��o)������ֹ���𣬶��r(sh��)�@ʾ�����@ʾ00��
�D3-8ϵ�y(t��ng)���w�·�D
4 �����O(sh��)Ӌ(j��)
4.1ϵ�y(t��ng)�\(y��n)�нY(ji��)��
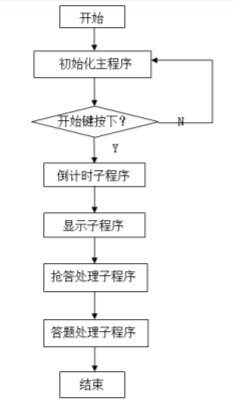
8λ��ِ��������������������r�£����Ȍ�����ϵ�y(t��ng)�M(j��n)�г�ʼ����Ȼ���M(j��n)���I�P���裬�Д��������Ƿ����ˡ��_ʼ���𡱰��I��������I�]�а��£��t�x�֟o������������_ʼ���𡱰��I���t��(zh��)�е�Ӌ(j��)�r(sh��)�ӳ�����@ʾ�ӳ����{(di��o)��������̎���ӳ�����������е�Ӌ(j��)�r(sh��)�����������Ӌ(j��)�r(sh��)�ͻش�Ӌ(j��)�r(sh��)���漰�ij����D��D4-1��4-2��4-3��ʾ��
�D4-1 ���������̈D
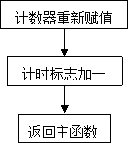
���r(sh��)��T1���ڵ�Ӌ(j��)�r(sh��)��ÿ���Д���50ms����(d��ng)Ӌ(j��)��(sh��)��(bi��o)־��20�r(sh��)����һ�룬�@ʾ��(sh��)�֜pһ�������̈D���£�
�D4-2 ��Ӌ(j��)�r(sh��)�Д����̈D
�D4-3���������̈DԔ��(x��)��B
4.2ϵ�y(t��ng)����
�����@�ε��n�O(sh��)�҂��x������AT89C51��Ƭ�C(j��)���O(sh��)Ӌ(j��)�O(sh��)Ӌ(j��)���������ܶ��|�������R�r(sh��)�W(xu��)�ģ���Proteus����ܛ����ʹ���Լ�keilܛ����ʹ�ã�߀�и��NӲ�����x��ͅ^(q��)�֡���ͨ�^���Y�Ϻ��Ѽ����P(gu��n)���īI(xi��n)���W(xu��)��(x��)ʹ�ø��Nܛ���������·�壬���B(y��ng)���ԌW(xu��)�����̈́����������������Ă��y(t��ng)�ČW(xu��)��(x��)ģʽ�£��҂����ܕ�ӛס�ܶ�ĕ���֪�R������ͨ�^�n���O(sh��)Ӌ(j��)���҂��W(xu��)������Ό��W(xu��)����֪�R�D(zhu��n)�����Լ��Ė|����������ԭ�ȵı��ӵĽ���֪�R�D(zhu��n)�Q�����ӵČ���֪�R���@�����f�njW(xu��)��(x��)�����ϵ�һ��(g��)�ܴ��ͻ�ơ�
���چ�Ƭ�C(j��)�O(sh��)Ӌ(j��)����Ӳ���·�DZ��^���εģ���Ҫ�ǽ�Q�����O(sh��)Ӌ(j��)�еĆ��}���������O(sh��)Ӌ(j��)��һ��(g��)���`��Ė|��������ӳ�����Q���}��߉˼�S�̈́�(chu��ng)��������������һ��(g��)�O(sh��)Ӌ(j��)���`�����ڡ����������(g��)�O(sh��)Ӌ(j��)�^���д֕r(sh��)�g�����ڳ�������ġ��ܶ��ӳ����ǿ��Խ��b�����ϵģ�������㕽Ӹ���(g��)�ӳ�������P(gu��n)�I�Ć��}���ڣ��@��Ҫ����Ƭ�C(j��)�ĽY(ji��)��(g��u)����Ϥ����˿����f��Ƭ�C(j��)���O(sh��)Ӌ(j��)��ܛ����Ӳ���ĽY(ji��)�ϣ��������ܲ��ɷֵġ�ͨ�^�@���n���O(sh��)Ӌ(j��)��Ҳ�l(f��)�F(xi��n)�Լ��ĺܶ��֮̎�����O(sh��)Ӌ(j��)�^�����Ұl(f��)�F(xi��n)�Լ����]���}�ܲ�ȫ�棬�Լ��Č��I(y��)֪�R���յĺܲ��ι̣������յ�Ӌ(j��)��C(j��)��(y��ng)��ܛ��߀����࣬��ϣ���Լ����@Щ����֮̎���ڽ��ČW(xu��)��(x��)�еõ����ơ��ҵ��O(sh��)Ӌ(j��)Ҳ߀������һЩȱ�ݣ��д����ڌ����O(sh��)Ӌ(j��)���M(j��n)һ����ߣ��ڴˑ�Ո�ώ����uָ�����@���O(sh��)Ӌ(j��)Ҳ�Ҷ��ü�(x��)��(ji��)�Q���ɔ������Ժ���O(sh��)Ӌ(j��)���ҕ���(y��n)����ȡ��Ӗ(x��n)�����ĸ��ã�




 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��
