��(bi��o)�}: ��Ƭ�C(j��)8λ��ِ�������O(sh��)Ӌ(j��) ģ�K�����c�ӿڶ��x [��ӡ���]
����: mmmz �r(sh��)�g: 2020-3-6 12:43
��(bi��o)�}: ��Ƭ�C(j��)8λ��ِ�������O(sh��)Ӌ(j��) ģ�K�����c�ӿڶ��x
һ�� ϵ�y(t��ng)�O(sh��)Ӌ(j��)
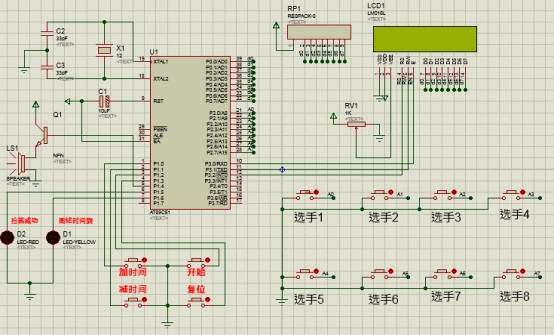
ԓ������ϵ�y(t��ng)���O(sh��)Ӌ(j��)���Ԇ�Ƭ�C(j��)�����Ŀ���ģ�K������ģ�K���O(sh��)Ӌ(j��)�İ�·�������������傀(g��)ģ�K���քe�飺���Iݔ��ģ�K���@ʾģ�K���r(sh��)��c��(f��)λģ�K�����Ŀ���ģ�K����(b��o)��ģ�K��
1.1���Iݔ��ģ�K
���Iݔ��ģ�K����14��(g��)���I���֞铌���I�Ϳ��ư��I�������I���а˂�(g��)���քe��S0�DS7���������x���M(j��n)�Г���ʹ�ã�P2.0-P2.7�ڞ�˂�(g��)���I������̖��ݔ��ڣ����ƽ��Ч�����ư��I��4��(g��)���քe�� ���ӕr(sh��)�g�����p�r(sh��)�g�����_ʼ�I������(f��)λ�I�����䌦��(y��ng)��I�MO�ӿڷ�P1.0��P1.1��P1.2��P1.3��
1.2�@ʾģ�K
�@ʾģ�K�ȿ����x��Һ���@ʾ����Ҳ�����x�Ô�(sh��)�a���@ʾ���҂����õ���Һ���@ʾ�·�퓌���x�ּ��r(sh��)�g��
1.3�r(sh��)��c��(f��)λģ�K
�r(sh��)��c��(f��)λģ�K�����r(sh��)��·�͏�(f��)λ�·����Ƭ�C(j��)����Сϵ�y(t��ng)�����ɕr(sh��)��·����(f��)λ�·���Դ�·����Ƭ�C(j��)��(g��u)�ɡ���Ƭ�C(j��)�ĕr(sh��)���̖�Á��ṩ��Ƭ�C(j��)Ƭ��(n��i)���N�����ĕr(sh��)�g����(zh��n)����Ƭ�C(j��)�ĕr(sh��)���̖ͨ���ÃɷN�·��ʽ�õ�����(n��i)����ʎ��ʽ���ⲿ��ʎ��ʽ����(f��)λ�����tʹ��Ƭ�C(j��)��Ƭ��(n��i)�·��ʼ����ʹ��Ƭ�C(j��)��һ�N�_���ij��B(t��i)�_ʼ�\(y��n)�С�����(j��)��(y��ng)�õ�Ҫ��(f��)λ����ͨ���ЃɷN������ʽ����늏�(f��)λ���_�P(gu��n)��(f��)λ����(d��ng)5lϵ�І�Ƭ�C(j��)�ď�(f��)λ���_RST(ȫ�QRESET)���F(xi��n)2��(g��)�C(j��)���������ϵĸ��ƽ�r(sh��)����Ƭ�C(j��)�͈�(zh��)�Џ�(f��)λ���������RST���m(x��)����ƽ����Ƭ�C(j��)��̎��ѭ�h(hu��n)��(f��)λ��B(t��i)��
1.4���Ŀ���ģ�K
���Ŀ���ģ�K�����˂����^��CPU����������(g��)ϵ�y(t��ng)�Ŀ����Ʋ��֣���ϵ�y(t��ng)�ĺ��Ŀ���ģ�K��51ϵ�еĆ�Ƭ�C(j��)��ֻ���҂�ͨ�^ܛ������ľ�������������?q��)����Ƭ�C(j��)��ԓϵ�y(t��ng)�ŕ����_�Ĺ�����
���������x���Ƭ�C(j��)���x��Ƭ�C(j��)��(sh��)�H�Ͼ��ǰ�CPU��RAM��ROM�����r(sh��)��/Ӌ(j��)��(sh��)����I/O�ӿ��·���͙C(j��)����Ҫ����������һ�KоƬ�ϣ���˷Q֮���Ƭ�C(j��)��
AT89C51��Ƭ�C(j��)��Ҫ�����²�����(g��u)�ɣ���λ̎����CPU����ʎ�·���������Ʋ������Д���Ʋ�����Ƭ��(n��i)Flash�惦����Ƭ��(n��i)RAM������I/O�ӿڡ����r(sh��)���ʹ���I/O�ӿڡ�AT89C51��Ƭ�C(j��)��(n��i)����CPU��4KB��FPEROM ��128B��RAM���ɂ�(g��)16λ�Ķ��r(sh��)/Ӌ(j��)��(sh��)��T0��T1��4��(g��)8λ��I/O��P0��P1��P2��P3�ȽM�ɡ���Ƭ�C(j��)��(n��i)������ĵIJ�����CPU��CPU���书�ܿɷ֞��\(y��n)�����Ϳ������ɲ��֡��������ɳ���Ӌ(j��)��(sh��)��PC��ָ�������ָ���g�a������(sh��)�r(sh��)�����c�l���D(zhu��n)��߉�·�ȽM�ɡ����Ĺ����nj����Դ惦���е�ָ���M(j��n)���g�a��ͨ�^��(sh��)�r(sh��)�����·����Ҏ(gu��)���ĕr(sh��)�̰l(f��)�����N��������ă�(n��i)�����ⲿ�Ŀ�����̖��ʹ�����օf(xi��)�{(di��o)���������ָ����Ҏ(gu��)���IJ������\(y��n)���������g(sh��)߉������ALU���ۼ���ACC���������������B(t��i)�ּĴ���PSW��BCD�a�\(y��n)���{(di��o)���·�ȽM�ɡ�������ߔ�(sh��)��(j��)̎����λ�������ܣ�Ƭ��(n��i)������һ��(g��)ͨ�üĴ���B��һЩ���üĴ�����߀������λ̎��߉�·�Ĺ��ܡ�
1.5��(b��o)��ģ�K
��(b��o)���·���ڈ�(b��o)������(d��ng)������(b��o)����̖�r(sh��)���l(f��)������(b��o)����(b��o)��ģ�K����һ��(g��)NPN�͵����O�ܺ�һ��(g��)���ȽM�ɵġ�
����ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
2.1���Ŀ���ģ�K�O(sh��)Ӌ(j��)
��Ƭ�C(j��)����Сϵ�y(t��ng)�����ɕr(sh��)��·����(f��)λ�·���Դ�·����Ƭ�C(j��)��(g��u)�ɡ���D1��
�D1
2.2���Iݔ��ģ�K�O(sh��)Ӌ(j��)
�I�P�چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)���܌�(sh��)�F(xi��n)���Ƭ�C(j��)ݔ�딵(sh��)��(j��)����������ܣ����˹����A(y��)��Ƭ�C(j��)����Ҫ�ֶΡ��I�P��(sh��)�|(zh��)����һ�M���I�_�P(gu��n)���ϡ�ͨ���I�P�����_�P(gu��n)��C(j��)е�����_�P(gu��n)���������˙C(j��)е�|�c(di��n)�ĺϡ������á��I���]���c��ӳ��ݔ��늉��dzʬF(xi��n)���ƽ����ƽ��������ƽ��ʾ���_��Ԓ����ô���ƽ�t��ʾ�I�]�ϣ�����ͨ�^���ƽ�ߵ͠�B(t��i)�ęz�y����ɴ_�J(r��n)���I�����c���˴_��CPU��һ�ΰ��I����ֻ�_�J(r��n)һ�ΰ��I������������ӵ�Ӱ푣��@�Ӳ���ʹ�I�P�چ�Ƭ�C(j��)ϵ�y(t��ng)�е�ʹ�õø��ӷ�(w��n)����
��������ݔ�밴�oʹ�ó��_�_�P(gu��n)���@Щ���_�_�P(gu��n)�M���˓����I��Ӳ���·���Σ��ڳ����O(sh��)Ӌ(j��)��Ҳ����(f��)�s��ֻҪ�ڳ����������ڰ��I�^���Юa(ch��n)���ġ�ë�̡��F(xi��n)��Ϳ����ˡ��@�������õķ������ӕr(sh��)�������ԭ��飺��?y��n)顰ë�̡��}�_һ����m(x��)�r(sh��)�g�̣��s���ms�������I�ĕr(sh��)�gһ���h(yu��n)�h(yu��n)�����@��(g��)�r(sh��)�g�����Ԯ�(d��ng)��Ƭ�C(j��)�z�y���а��I���o�����ӕr(sh��)һ�Εr(sh��)�g���@��ȡ10ms�������Д���ƽ�Ƿ�ԭ��B(t��i)������DŽt����Ч���I����t�oЧ��
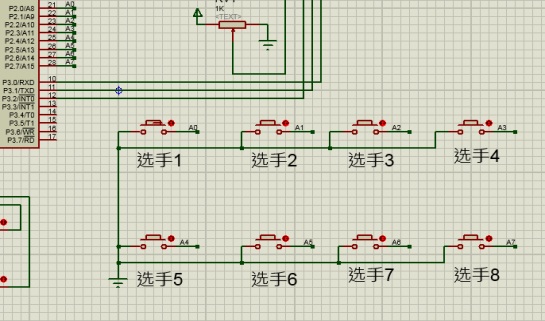
AT89C51��Ƭ�C(j��)P2.0-P2.7�˿ڷքe�cS0-S7���o���B����(y��ng)8��(g��)��ͬ���x�ֵē����I���x��ͨ�^�����I�M(j��n)�Г��𣬆�Ƭ�C(j��)������̖���(n��i)���M(j��n)��̎�������@ʾ�����@ʾ�x�־�̖����(n��i)���M(j��n)���i�档��D2.2��ʾ��
�D2.2
2.3�@ʾģ�K�O(sh��)Ӌ(j��)
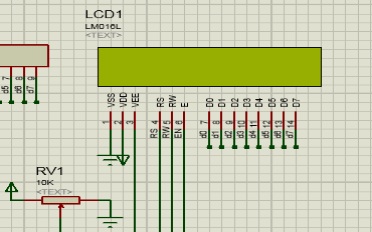
�چ�Ƭ�C(j��)�đ�(y��ng)��ϵ�y(t��ng)�У��@ʾ�����Ҋ��ݔ���O(sh��)�䣬Ҳ���˙C(j��)��Ԓ�ز����ٵIJ��֡��@ʾ�·�\(y��n)�õ���LCD�@ʾ������D2.3.1��ʾ
�D2.3.1
���_�D��D2.3.2��ʾ
�D2.3.2
�˿ڶ��x��RS��Ĵ����x���ƽ1�r(sh��)�x��(sh��)��(j��)�Ĵ��������ƽ0�r(sh��)�x��ָ��Ĵ�����RW���x����̖�������ƽ(1)�r(sh��)�M(j��n)���x���������ƽ(0)�r(sh��)�M(j��n)�Ќ�������E(��EN)�˞�ʹ��(enable)��,���ƽ(1)�r(sh��)�xȡ��Ϣ��ؓ(f��)��׃�r(sh��)��(zh��)��ָ�D0��D7��8λ�p��(sh��)��(j��)�ˡ�VEE��Һ�����ȶ��{(di��o)���ˣ������Դ�r(sh��)���ȶ��������ӵ��Դ�r(sh��)���ȶ���ߣ����ȶ��^�ߕr(sh��)���a(ch��n)������Ӱ����ʹ�Õr(sh��)ͨ�^��һ��(g��)10K���λ���{(di��o)�����ȶȡ�
2.4�r(sh��)��·
��Ƭ�C(j��)����ڕr(sh��)犵��(q��)���²��ܹ�����AT89C51��Ƭ�C(j��)�ĕr(sh��)犮a(ch��n)�������ЃɷN����(n��i)���r(sh��)犷�ʽ���ⲿ�r(sh��)犷�ʽ���oՓ�ηN��ʽ������Ҫ�ⲿ�����·���a(ch��n)���r(sh��)��}�_��
�ⲿ�r(sh��)犷�ʽ����ֱ�ӌ��ⲿ����ʎ�}�_ͨ�^XTALl��XTAL2�����Ƭ�C(j��)���ⲿ�r(sh��)犷�ʽ�����ڶ��C(j��)ϵ�y(t��ng)���Ա����(g��)��Ƭ�C(j��)�܉�ͬ�r(sh��)���������ⲿ��ʎ��̖�o����Ҫ���豣�C�}�_���Ȳ�С��20ns�����l�ʑ�(y��ng)���چ�Ƭ�C(j��)��֧�ֵ�����l�ʡ�
��(n��i)���r(sh��)犷�ʽ�������Æ�Ƭ�C(j��)оƬ��(n��i)������ʎ����ͨ�^�����_XTALl��XTAL2�ɶ˿�Ӿ��w��ʎ������(g��u)�ɷ�(w��n)�����Լ���ʎ���ķ��������ɫ@�õ��Լ���ʎ���l(f��)����(w��n)�����}�_��ֱ������оƬ��(n��i)���ĕr(sh��)��·�ķ�ʽ����ӵľ��w��ʎ������ѽ�(j��ng)���t����XTAL2���_��ݔ��һ����ֵ�����Ҳ����Լ���ʎ�����l��ȡ�Q�ھ��w��ʎ�����l�ʣ���Ҋ�ľ��w��ʎ���l����6MHz��12MHz��
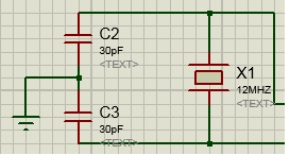
��ϵ�y(t��ng)�в��õ��ǃ�(n��i)���r(sh��)犷�ʽ���r(sh��)��·��D2.4��ʾ��
�D2.4
�ĕr(sh��)��·��ʾ��D�п��Կ�������Ƭ�C(j��)����ӵľ��w��ʎ����߅߀�Ѓɂ�(g��)�����C2��C3��C2��C3���Q���C����ݣ���Ҫ�����Ѓ��c(di��n)��һ�ǿ��Դ�ʹ��Ƭ�C(j��)ϵ�y(t��ng)����������C2��C3���Ќ��l���M(j��n)���{(di��o)���ã������چ�Ƭ�C(j��)ϵ�y(t��ng)��ʎ�l�ʵķ�(w��n)�����S�ֆ�Ƭ�C(j��)�������\(y��n)�С��C����ݵ���ֵ�x���c���õľ��w��ʎ�����l��ֵ���P(gu��n)�����w��ʎ������ʎ�l��Խ�ߣ�����(y��ng)���C����ݵ���ֵҲҪ��ߡ����������ϵĺã����l(f��)�]�C����ݵķe�O���á���֮���Լ���ʎ���l�ʵķ�(w��n)���Ԍ��ܵ�Ӱ푡���(j��ng)�^�����Č�(sh��)�H��(y��ng)�ã����w��ʎ�����l���c�C����ݵ���ֵ֮�g�γ���һ���Ĺ̶����䡣���磺��(d��ng)���w��ʎ�����l�ʞ�12MHz�r(sh��)���C����ݵ���ֵһ���30pF���ҡ�
��Ƭ�C(j��)�ڹ����r(sh��)���Ƀ�(n��i)����ʎ���a(ch��n)��������ֱ��ݔ���������(n��i)������߉��Ԫ�ĕr(sh��)���̖�����ڷQ��r(sh��)����ڡ����С�Ǖr(sh��)���̖�l�ʵĵ���(sh��)������T=1/fosc��ʾ���D�Еr(sh��)��l�ʞ�12MHz����fosc=12MHz���t�r(sh��)����ڞ�1/12��s�����·�ڼ�늴�s���t10ms����ʎ��������XTAL2���_�a(ch��n)�����Ȟ�3V���ҵ����Ҳ��r(sh��)���̖��
���˜pС������ݣ����õر��C��ʎ����(w��n)�����ɿ��ع��������O(sh��)Ӌ(j��)�·��r(sh��)�����w��ʎ�����C����ݵ�λ�Ñ�(y��ng)�M���ܵؿ�����Ƭ�C(j��)��XTALl��XTAL2���_ ��
2.5��(f��)�
ʹCPU�M(j��n)���ʼ��B(t��i)����0000H��ַ�_ʼ��(zh��)�г�����^�̽�ϵ�y(t��ng)��(f��)λ����Ƭ�C(j��)���������Ԅ��M(j��n)�Џ�(f��)λ������������(y��ng)���ⲿ��(f��)λ�·���܌�(sh��)�F(xi��n)���Č�(sh��)�F(xi��n)ϵ�y(t��ng)��(f��)λ�ķ���������ϵ�y(t��ng)��(f��)λ�ɷ֞�Ӳ����(f��)λ��ܛ����(f��)λ��
Ӳ����(f��)λ���ͨ�^CPU�ⲿ��Ӳ���·�oCPU��RESET�˼������r(sh��)�g�ĸ��λ���܌�(sh��)�F(xi��n)����늏�(f��)λ���˹����o��(f��)λ��Ӳ�����T����(f��)λ����Ӳ����(f��)λ��Ӳ����(f��)λ�����üĴ����Ġ�B(t��i)������ʼ�����Ҍ�Ƭ��(n��i)ͨ�üĴ����ă�(n��i)�ݛ]��Ӱ푡�
ܛ����(f��)λ������һϵ��ָ���ģ�MӲ����(f��)λ���ܣ����ͨ�^�D(zhu��n)��ָ��ʹ�����0000H��ַ�_ʼ��(zh��)�С��������üĴ����ď�(f��)λ���������ģ�Ҳ�]�б�Ҫ��ȫģ�M���ɸ���(j��)��(sh��)�H��Ҫȥ�������ʼ���^������ɡ������Д༤���(bi��o)־��������������z������?y��n)����]�����_��λ��ַ�ɹ����̡��еľ����ˆT��020000��LJMP 0000H������ܛ�����壬�J(r��n)��ֱ���D(zhu��n)��0000H��ַ�������ܛ����(f��)λ�������@��e(cu��)�`�ĵ��ʹ�����ܛ����(f��)λ��ʹ��ܛ�������ܛ�����T�������M(j��n)�еĹ������@�r(sh��)������e(cu��)��ȫ�п��ܰl(f��)�����Д��ӳ����У��Д༤���(bi��o)־����λ��������ֹͬ���Д�푑�(y��ng)������ܛ�����T�Ǹ��Д࣬������ֹ�fҪ�Д�푑�(y��ng)���ɴ˿�Ҋ����Д༤���(bi��o)־����Ҫ�ԡ�
��Ƭ�C(j��)�ĵ�9�_RST��Ӳ����(f��)λ�ˣ�ֻҪ��ԓ�˳��m(x��)4��(g��)�C(j��)�����ڵĸ��ƽ���Ɍ�(sh��)�F(xi��n)��(f��)λ����(f��)λ���Ƭ�C(j��)�ĸ���B(t��i)���֏�(f��)����ʼ����B(t��i)�����·�D��D2.5��ʾ��

�D2.5
��(f��)λ�·��ԭ���dž�Ƭ�C(j��)RST���_���յ�2uS���ϵ��ƽ��̖��ֻҪ���C��ݵij��늕r(sh��)�g����2uS�����Ɍ�(sh��)�F(xi��n)��(f��)λ�������·�е����ֵ�ǿ��Ը�׃�ġ�ֵ��ע����ǣ����O(sh��)Ӌ(j��)��(d��ng)��ʹ�õ���Ӳ����(f��)λ��ܛ����(f��)λ�ɷN���ܣ�ܛ��(f��)λ��(sh��)�H�Ͼ��Ǯ�(d��ng)�����(zh��)���ꮅ֮������ָ�ͨ�^һ�l���D(zhu��n)ָ�������D(zhu��n)�������(zh��)�е���ʼ��ַ��
2.6��(b��o)��ģ�K�O(sh��)Ӌ(j��)
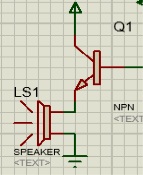
��(b��o)��ģ�K�Ĺ������ڟo�˓�����U�����r(sh��)����r��(b��o)�������w�·��D2.6��
�D2.6
�˿ڶ��x�����O����NPN��С�������O�ܣ����O�B�ӆ�Ƭ�C(j��)���l(f��)��O�B�����Ȳ��M(j��n)���(q��)�ӡ�
2.7���w�O(sh��)Ӌ(j��)�D
����ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
��(sh��)�(y��n)��ܛ���O(sh��)Ӌ(j��)���Է֞���������ⲿ�Д���֡�
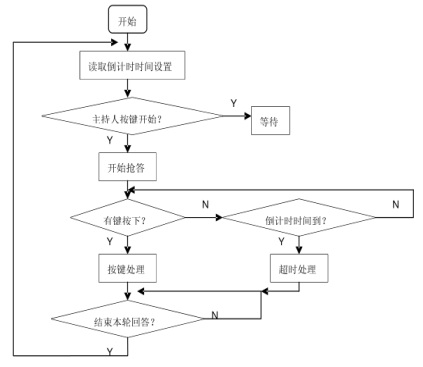
�����̈D��
�ⲿ�Д�������̣�
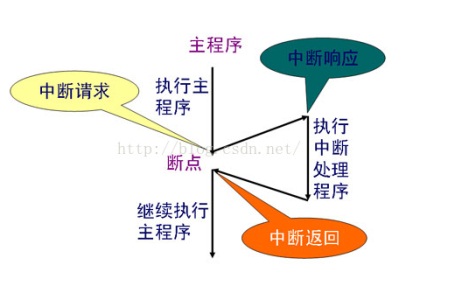
Դ����
#include<reg51.h>
#include<lcd1602.h>
sbit sjjia=P1^0; //���x�r(sh��)�g�Ӱ��o
sbit sjjian=P1^1; //���x�r(sh��)�g�p���o
sbit kaishi=P1^2; //���x�_ʼ���o
sbit fuwei=P1^3; //���x��(f��)��o
sbit soud=P1^4; //��(b��o)�����o
sbit led_r=P1^5; //���x����ɹ�ָʾ
sbit led_y=P1^6; //���x�U���r(sh��)�g��ָʾ
unsigned char num[]={'0','1','2','3','4','5','6','7','8','9'},num2;
unsigned char model,time,temp;
void init() //��ʼ������(sh��)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
ET0=1;
TR0=0;
EA=1;
P1=0x0f;
model=0;
time=30;
}
void delay(unsigned char i) //�ӕr(sh��)����(sh��)
{
unsigned char j,k;
while(i--)
for(j=100;j>0;j--)
for(k=100;k>0;k--);
}
void star() //����
{
lcd_xml(0x80);lcd_xsj(" welcome ");
delay(100);
lcd_xml(0xc0);lcd_xsj(" 8 Way Responder");
delay(80);
}
void led_num() //ˢ�µ�Ӌ(j��)�r(sh��)
{
lcd_xml(0x80);lcd_xsj(" Countdown : ");
lcd_xml(0x8d);lcd_xsj2(num[time/10]);
lcd_xml(0x8e);lcd_xsj2(num[time%10]);
}
void reset() //��(f��)λ
{
TR0=0;
P1=0x0f;
led_r=0;
led_y=0;
P2=0xff;
model=0;
time=10;
led_num();
lcd_xml(0xc0);lcd_xsj(" Not started ");
}
void Not_started()
{
if(sjjia==0)
{
delay(10);
if(sjjia==0)
{
time++;
if(time==100) time=0;
led_num();
}
}
if(sjjian==0)
{
delay(10);
if(sjjian==0)
{
time--;
if(time==0) time=99;
led_num();
}
}
if(kaishi==0)
{
delay(10);
if(kaishi==0)
{
model=1;
TR0=1;
lcd_xml(0xc0);lcd_xsj(" Start Responder");
soud=1;delay(10);soud=0;
}
}
}
void anjian()
������Word��ʽ�ęn51�����d��ַ��
http://www.zg4o1577.cn/bbs/dpj-180994-1.html
| �gӭ���R (http://www.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
��վ֩���ģ�壺
亚洲精品欧美
|
操亚洲|
久久久女女女女999久久
|
91精品久久久久久综合五月天
|
欧美日韩中
|
精品国产乱码久久久久久影片
|
国产精品久久国产精品
|
一级做a爰片性色毛片视频停止
|
久久久久1
|
91久久电影
|
免费的网站www
|
日韩精品在线看
|
性生活毛片
|
国产成人一区二区三区精
|
日干夜操
|
一区二区国产精品
|
日韩中文字幕
|
国产一区二区在线免费
|
欧美精品一区二区在线观看
|
日日夜夜精品视频
|
国产精品一区二区三区在线
|
午夜影院普通用户体验区
|
精品亚洲视频在线
|
亚洲欧洲在线看
|
五月婷亚洲
|
久久成人免费
|
91av在线不卡
|
久久久久久久夜
|
欧美一区二区三区的
|
中文字幕第一页在线
|
国产高清免费视频
|
久久伊人亚洲
|
成人精品鲁一区一区二区
|
国产日韩一区二区
|
国产成人网
|
国产成人精品999在线观看
|
岛国视频
|
在线日韩
|
成人午夜免费视频
|
久久不射电影网
|
国产精品福利网站
|