|
發(fā)布時間: 2019-5-31 21:52
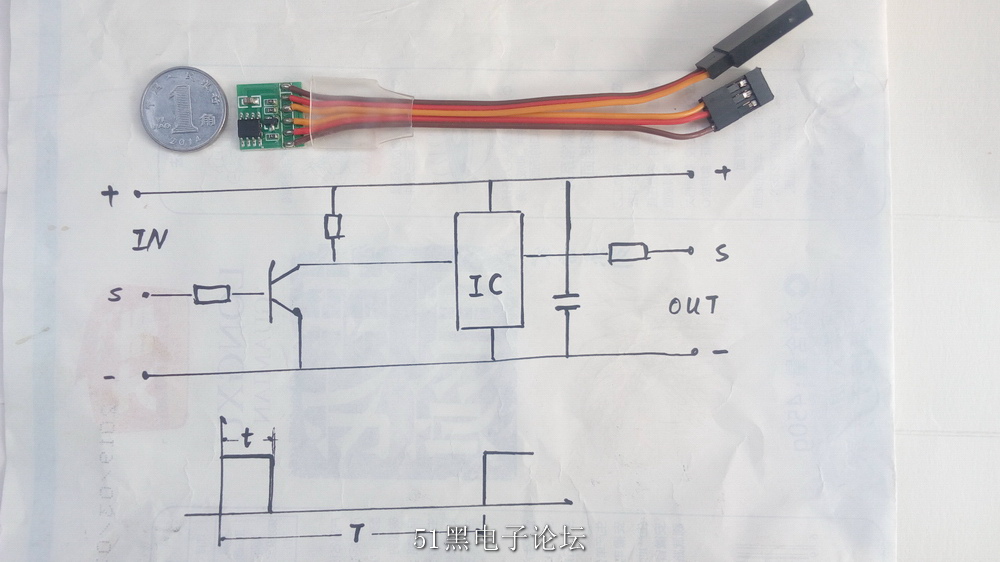
正文摘要:“舵機反向器”的作用讓舵機搖臂向反擺動,比如輸入是0~90度(t=1~2ms, T=20ms),輸出就是90~0度(t=2~1ms, T=20ms); 如果輸入30度,輸出就是60度。0~135度或0~180度同理。 注:市場上普通的遙控器t=1~2ms,T=20 ... |
| 上面IC什么型號? |
| 提供代碼學習一下唄 |
honey_teck 發(fā)表于 2019-5-31 23:26 你好!因為是第一次發(fā)帖子,很多規(guī)矩不懂,以為帖子沒有發(fā)出來,所以沒及時回復,不好意思。 您說的輸入信號需要使用計時器,讓我很受啟發(fā),謝謝! 在反向上,是t的時間取反,不是電平取反,比如90度信號:輸入t=1ms,輸出t=2ms,如果輸入t=1.2ms,輸出就是1.8ms(T=20ms周期不變)。 |
| 我不確定是否理解正確,如果你畫的那個波形圖是輸入的話,那么輸出就應該是與它相反的波形。實現(xiàn)方法就是使用定時器,定時周期20ms,檢測輸入,有輸入時,開啟定時器,同時輸出和輸入反向(也就是如果輸入為高,輸出就為低)。隨時檢測輸入,當輸入為低時,讓輸出為高,20ms定時到時,讓輸出為低,關定時器,一個周期完成 |
Powered by 單片機教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
