|
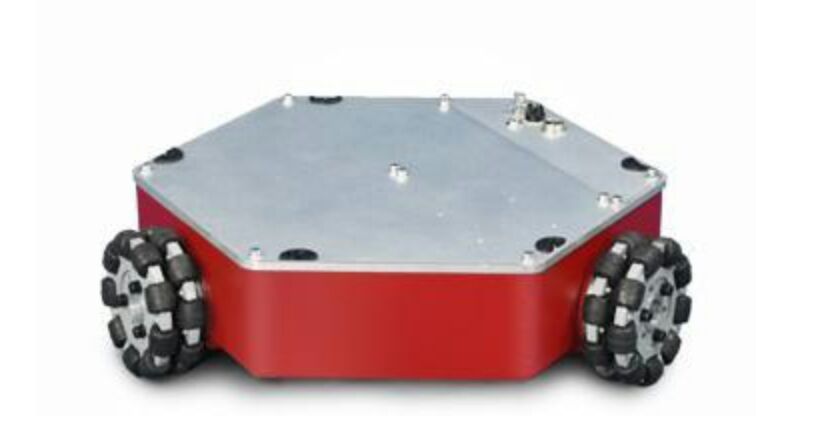
這個叫全向輪…… 先考慮平動情況,在不考慮車身全身旋轉的情況下,每個輪子可以分別提供三個在平面上相差120°的驅動矢量。矢量的大小就是車輪的轉速,由單片機控制。根據矢量疊加原理,這三個矢量可以合成任何方向的合矢量,這個矢量就是車身運動的速度。也就是說,要讓車身以某一個速度(顯然這個速度必須在它能達到的最高速度之內)朝著某一個方向前進,就用矢量分解的方法,將目標速度分解為相差120°的三個矢量,三個矢量的大小就對應著車輪的轉速。 轉動情況更簡單,三個輪子同時朝一個方向轉動就可以實現車身自轉。如果不想讓車身自轉,就用陀螺儀做方向閉環。 將車身平動和轉動對輪子速度的計算結果疊加,就可以實現任意方式運動。 |
 收藏
收藏 頂
頂 踩
踩

