熱門: 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂(lè)園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
熱門: 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂(lè)園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
|
發(fā)布時(shí)間: 2020-9-23 11:30
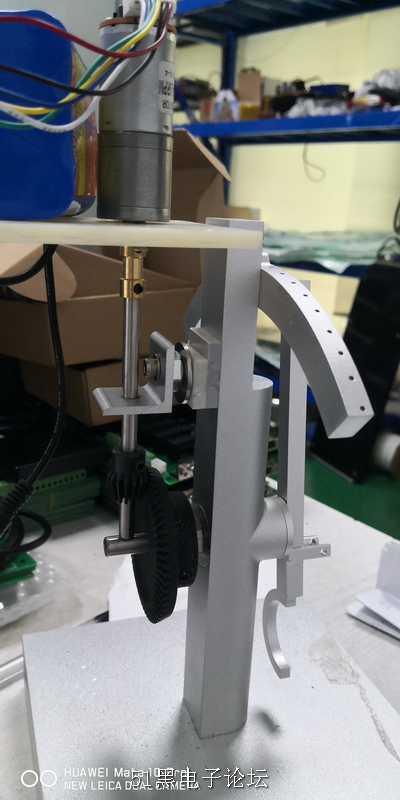
正文摘要:單片機(jī)STM32控制電機(jī)驅(qū)動(dòng)芯片a4950,然后電機(jī)轉(zhuǎn)動(dòng),控制齒輪轉(zhuǎn)動(dòng),程序設(shè)定的轉(zhuǎn)向時(shí)長(zhǎng)都一樣,電機(jī)轉(zhuǎn)動(dòng)時(shí),測(cè)得實(shí)際時(shí)長(zhǎng)相差值也不超過(guò)0.02秒,然后正反轉(zhuǎn)時(shí)控制電壓差值也在0.01伏左右,但是實(shí)際控制擺動(dòng)總是會(huì)逐漸 ... |
|
本帖最后由 XTXB 于 2020-9-23 18:12 編輯 運(yùn)動(dòng)誤差引起原點(diǎn)飄移,加個(gè)行程開關(guān)作為原點(diǎn),每經(jīng)過(guò)一次復(fù)位一次原點(diǎn)就可以了。 |
明浩 發(fā)表于 2020-9-23 15:12 我的電機(jī)是帶有編碼器的,是可以測(cè)量速度和旋轉(zhuǎn)角度,但是如何通過(guò)它改變擺動(dòng)時(shí)的偏向問(wèn)題呢 |
ttttttttttttty 發(fā)表于 2020-9-23 16:15 螺旋齒輪和我現(xiàn)在用的齒輪相比,轉(zhuǎn)動(dòng)時(shí)的差別是什么呢 |
長(zhǎng)風(fēng)007 發(fā)表于 2020-9-23 16:45 我用的不是步進(jìn)電機(jī),會(huì)有丟步現(xiàn)象嗎,是如何看電機(jī)與之是否匹配 |
| 電機(jī)加裝編碼器,齒輪減速箱用精度高的,齒輪間無(wú)間隙那種 |
| 電機(jī)轉(zhuǎn)動(dòng)帶動(dòng)控制齒輪轉(zhuǎn)動(dòng),程序設(shè)定的轉(zhuǎn)向時(shí)要先看一下電機(jī)是否匹配,電機(jī)轉(zhuǎn)動(dòng)時(shí)如果有丟步現(xiàn)象就會(huì)出現(xiàn)偏向一側(cè)現(xiàn)象。 |
| 如果把上齒輪換成螺旋齒輪會(huì)不會(huì)精度會(huì)更高一點(diǎn) |
| 要想精確可以加入編碼盤 |
feelings 發(fā)表于 2020-9-23 13:59 樓主就算能調(diào)試成功也維持不了多長(zhǎng)時(shí)間,想長(zhǎng)期穩(wěn)定精確控制只能加位置傳感器或用步進(jìn)電機(jī)。 |
wc86110 發(fā)表于 2020-9-23 13:50 我能想到的影響因素只有電壓,時(shí)長(zhǎng)和齒輪嚙合這三個(gè)了,然后改進(jìn)這些方面的結(jié)果沒有很理想,從你的方面可以想到哪些呢 |
| 影響機(jī)電精準(zhǔn)控制的因素很多,什么原因引起的偏差只能自查改進(jìn)啦,這種事網(wǎng)友是幫不上忙地 |
Powered by 單片機(jī)教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
