|
發布時間: 2020-11-10 18:05
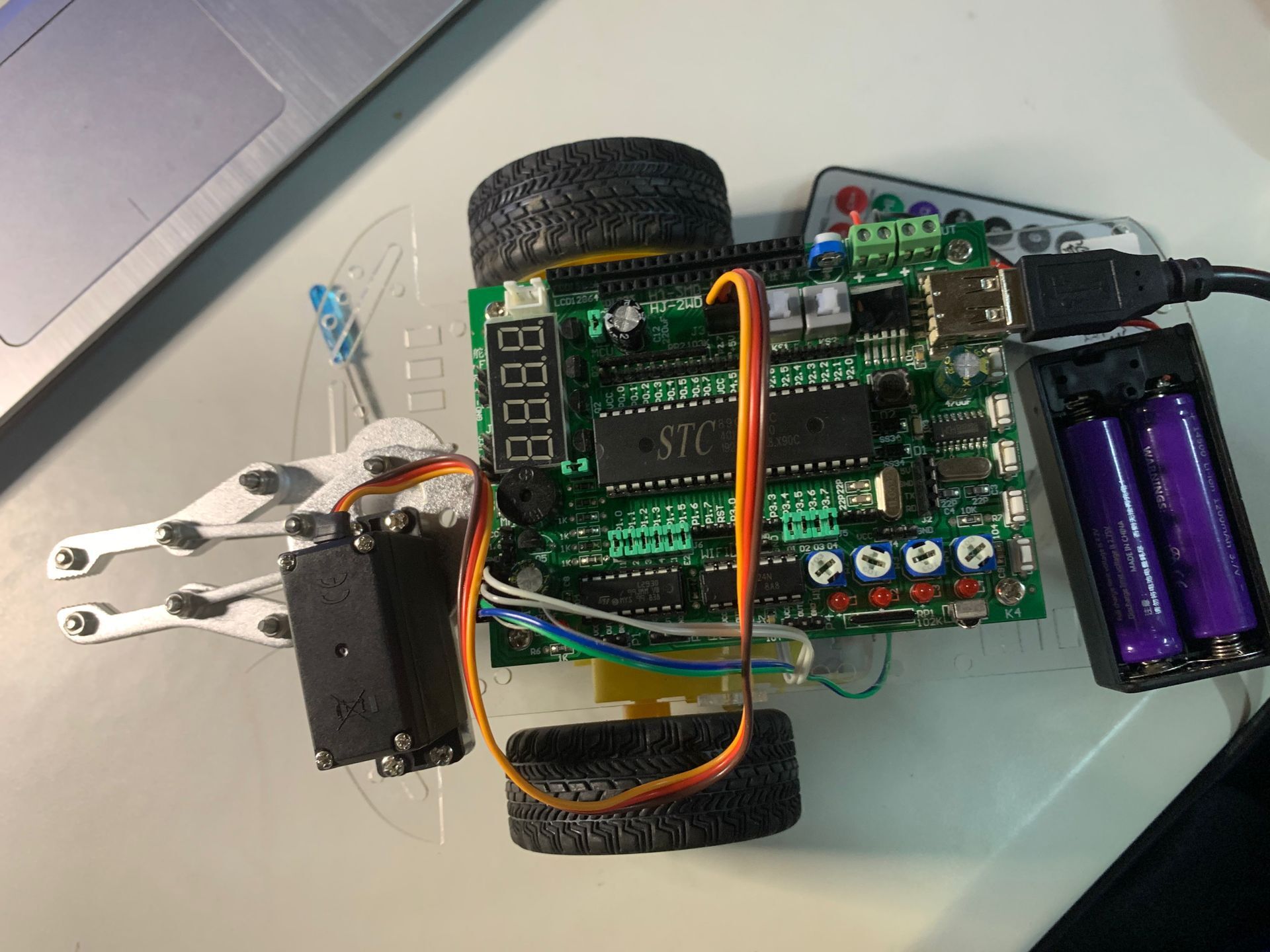
正文摘要:如題,基于51單片機紅外遙控智能小車前進后退左轉右轉。現在剩下基于51單片機舵機的機械手控制對物品的夾取與放下實在不懂弄。有人懂弄基于51舵機的機械手控制對物品的夾取與放下嗎? |
| 給舵機特定的方波信號,控制舵機的角度 |
| 某一個寶的套件??還是自己做的 |
| 可以試試用攝像頭做識別,這樣就可以去抓起東西,我都是先識別的,不然怎么知道抓什么,然后就舵機控制就簡單了 |
鬼推磨 發表于 2021-11-11 14:06 舵機是旋轉一定角度,可以通過這個角度,加個齒輪控制夾子的開合角度 |
鬼推磨 發表于 2021-11-11 14:06 只要不超電壓,堵轉1天都不會出問題。 |
| 就一個自由度的機械夾子,也沒加壓力傳感器,難度在哪呢?設兩個按鍵,一個按一次正轉5度,一個反轉五度,舵機程序網上有,就不貼了。然后你就遙控著加放東西,要自動夾的話,你的硬件不夠啊。不過找個比較差的舵機,夾上后它自動打滑,就不會堵轉還能夾住。 |
鬼推磨 發表于 2021-11-11 14:06 不會的,要是這么容易燒掉光實驗成本都消耗不起 |
| 用定時器產生一個200ms為周期的信號,高電平在5ms~25ms對應控制舵機的角度0°~180°。通過舵機轉動的角度實現機械手的抓取。 |
鬼推磨 發表于 2021-11-11 14:06 沒問題的這個電爪一般用的都是舵機和電推桿 |
| 夾物體不就相當于把舵機堵轉?這樣舵機能堅持多久不燒掉? |
| 給舵機一個特定的方波信號就可以控制舵機的角度了。 |
| 給舵機特定的方波信號,控制舵機的角度,可以實現夾取物體 |
| 先搞懂舵機的控制原理,簡單來說:用定時器產生一個200ms為周期的信號,高電平在5ms~25ms對應控制舵機的角度0°~180°。通過舵機轉動的角度實現機械手的抓取。 |
 收藏
收藏 頂
頂 踩
踩

