|
發布時間: 2017-8-10 01:03
正文摘要:本帖最后由 51黑電賽專員 于 2017-8-10 01:04 編輯 2017年全國大學生電子設計競賽試題1.基本部分 2017年全國大學生電子設計競賽所有題目詳見:http://www.zg4o1577.cn/bbs/dpj-92198-1.html |
huanlin123 發表于 2017-8-10 07:22 滾球源碼能分享下嗎 |
huanlin123 發表于 2017-8-10 07:22 他用的是stm32嗎?攝像頭用的是哪個??還有這個源程序是什么的源程序? |
| PID算法不會 |
| 還是舵機好用,推桿完全沒法用。。。很不穩定,速度和PWM的關系不是線性的 |
| 我們在進行PID測試的時候除了問題,完全調節不好 |
| pid怎么弄? |
| 圖像處理 |
l1050634254 發表于 2017-8-10 12:48 大神 pid怎么弄 |
暖陽. 發表于 2017-8-10 11:05 pid怎么弄呀 大神 |
| 用舵機調節要比直線電機靈活一點 |
| 用觸摸屏應該也可以 |
| 攝像頭可以采用鷹眼,這個的幀數是絕對夠的。控制系統其實使用STM32也是完全足夠的 |
| 攝像頭要采集到65cm*65cm的距離太遠了,如果板子反光基本就廢了。。 |
| 紅外定位不行吧,有點遠。 |
| 需要用到角度傳感器嗎 |
| 小球的檢測很煩的,直接用開環的系統,把程序寫死,多調試下參數,賭一波 |
| 有關于mg996r的程序嗎?51的 |
| 上位機加下位機,上位機算小球坐標,下位機負責pid及其它。能解決 |
|
舵機操作簡單,應該挺好用的 |
| PID加直線電機應該可以 |
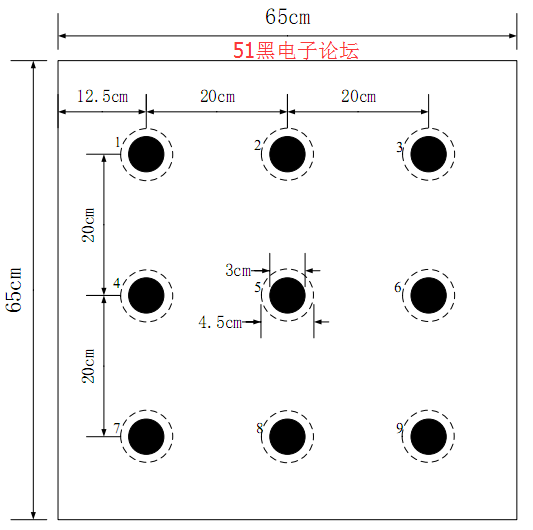
12864l 發表于 2017-8-10 09:28 他這沒寫出來,但是原題中明確要求65*65的板子 |
12864l 發表于 2017-8-10 09:28 在電賽原件中已經說了“邊長為 65cm 光滑的正方形平板” |
| 紅外線實現的可能性比較低,不如攝像頭做圖像處理可靠 |
|
第一,板子的選擇直接決定你的方案可行還是不可行,用舵機,板子太重很容易燒。 第二,選擇什么方案檢測小球,小球的位置是關鍵點,攝像頭ov7670,2640,等都是不錯的選擇,或者是矩陣紅外檢測,精確度不高。 第三,你的底層驅動,控制板的上下擺動。步進絲桿電機,推桿電機都可以,但是也得進一步去論證, 第四,提前準備兩套方案,隨時可以更換。 題目也沒有固定說是65cm的板子,最小其實可以43厘米,不過得絕對精確,不然小球的慣性直接飛出去,失去比賽資格,。板子大一點有好處,不要一味追求小 |
| 圖像處理加pid控制,可以解決的 |
|
用攝像頭的話還要考慮單片機的處理速度,難! 51hei有大神分享的源碼:http://www.zg4o1577.cn/bbs/dpj-115140-1.html 下面是老外做的滾球開源方案:http://www.zg4o1577.cn/bbs/dpj-92350-1.html  |
 收藏
收藏 頂
頂 踩
踩

