
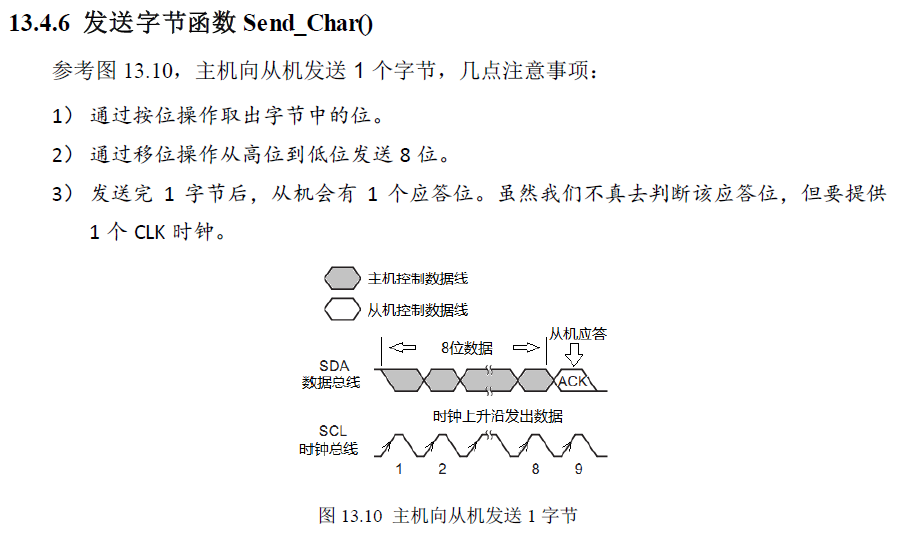
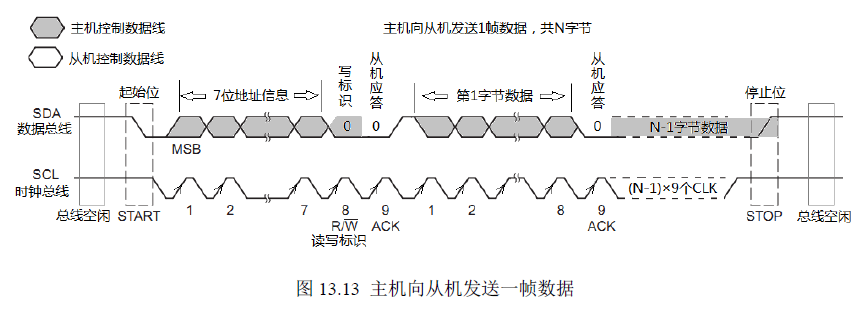
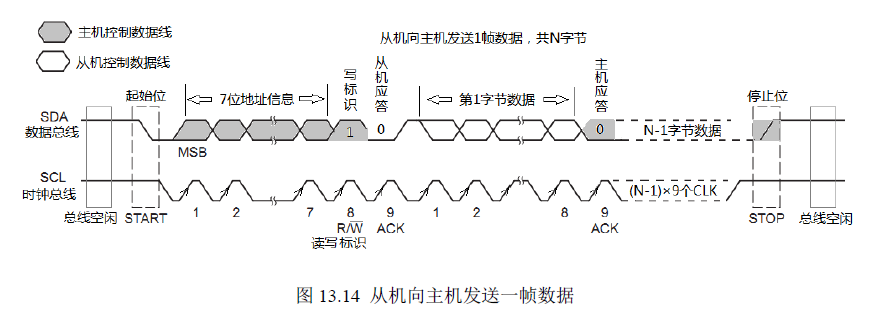
先來重新學習回顧I2C的協議:
/**********************************************
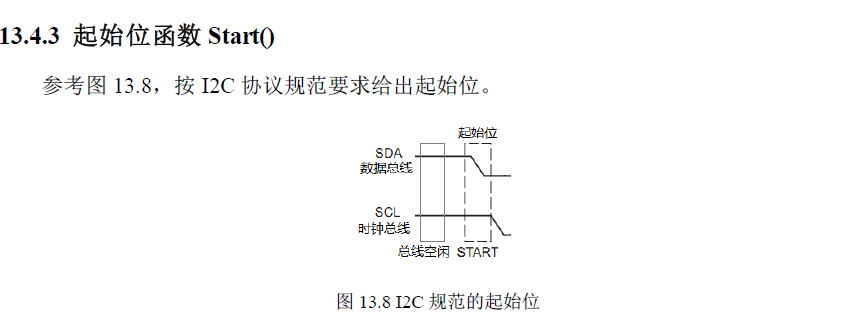
//IIC Start
**********************************************/
void IIC_Start()
{
SCL_HIGH;// SCL一直為高電平,等待SDA的下降沿到來產生一個起始信號
i2c_delay_us();
SDA_HIGH;
i2c_delay_us();
SDA_LOW;
i2c_delay_us();
SCL_LOW;// SCL拉低,允許SDA變化
i2c_delay_us();
}
/**********************************************
/**********************************************
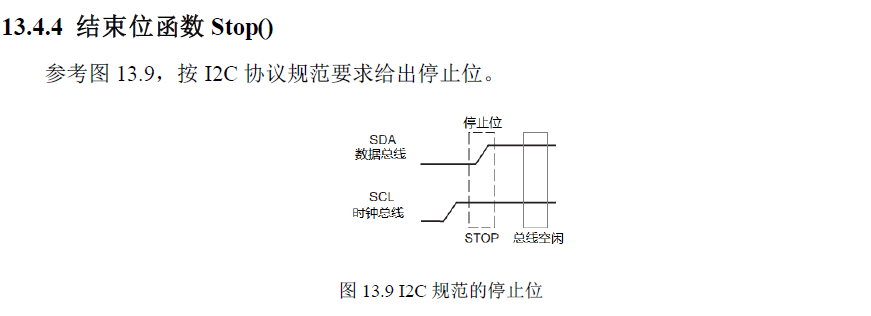
//IIC Stop
**********************************************/
void IIC_Stop(void)
{
SCL_HIGH;// SCL一直為高電平,等待SDA的上升沿到來產生一個停止信號
i2c_delay_us();
SDA_LOW;
i2c_delay_us();
SDA_HIGH;
i2c_delay_us();
}
}
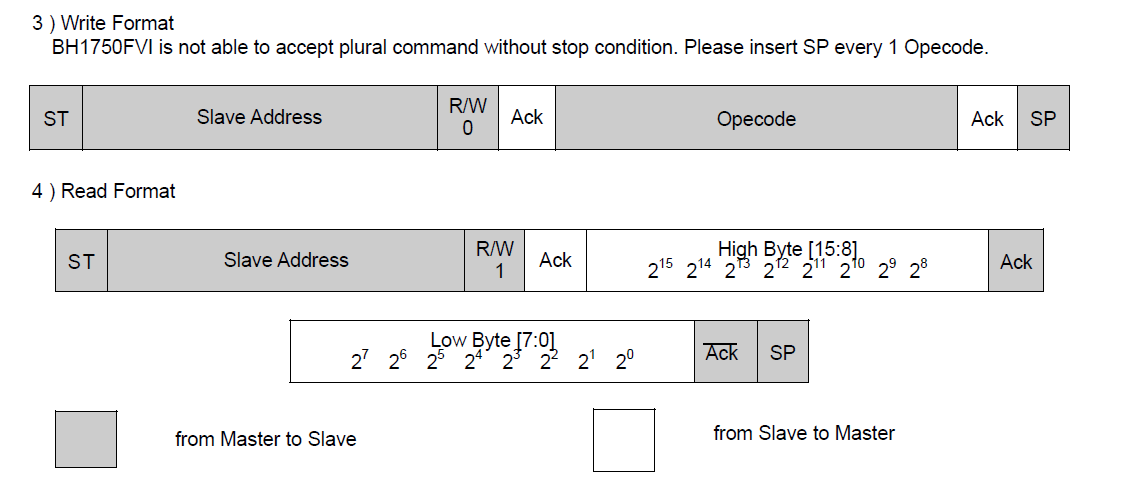
以下是BH1750光強模塊的IIC操作:
//*********************************BH1750單個寫入數據
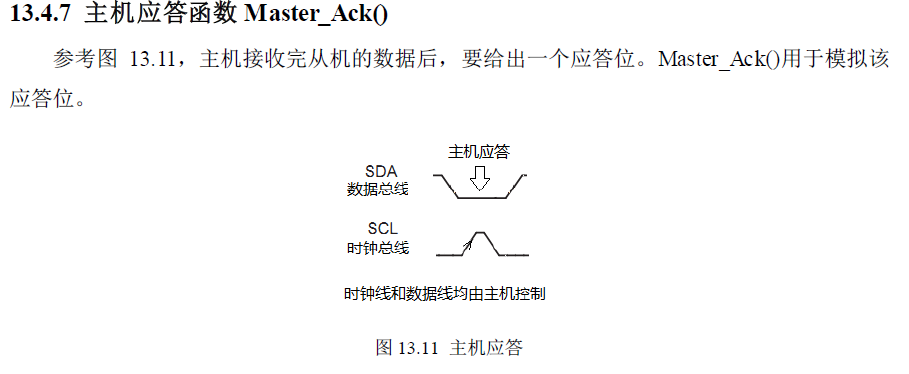
//**********************主機接收應答信號
uint8 Master_RecvACK(void)
{
uint8 i = 200;
uint8 Temp = 0;
SCL_HIGH;// 在響應的時鐘脈沖期間接收器將SDA線拉低使它在這個時鐘脈沖的高電平期間保持穩定的低電平
i2c_delay_us();
while((SDA_State!=0) || (i>0)) i--;// 判斷數據線時候存在應答信號"0", i是防止死循環死機
Temp = SDA_IN;
SCL_LOW;// SCL拉低,允許SDA變化
i2c_delay_us();
return Temp;
} //**********************主機發送應答信號(ACK:0 NCK:1)
void Master_SendACK(uint8 bit)
{
//SCL_LOW;// SCL拉低,允許SDA變化
//i2c_delay_us();
if(bit == 0)// ACK
{
SDA_LOW;
i2c_delay_us();
}
else if(bit == 1)// NCK
{
SDA_HIGH;
i2c_delay_us();
}
SCL_HIGH;//時鐘線置1,數據被寫進
i2c_delay_us();
SCL_LOW;// SCL拉低,允許SDA變化
i2c_delay_us();
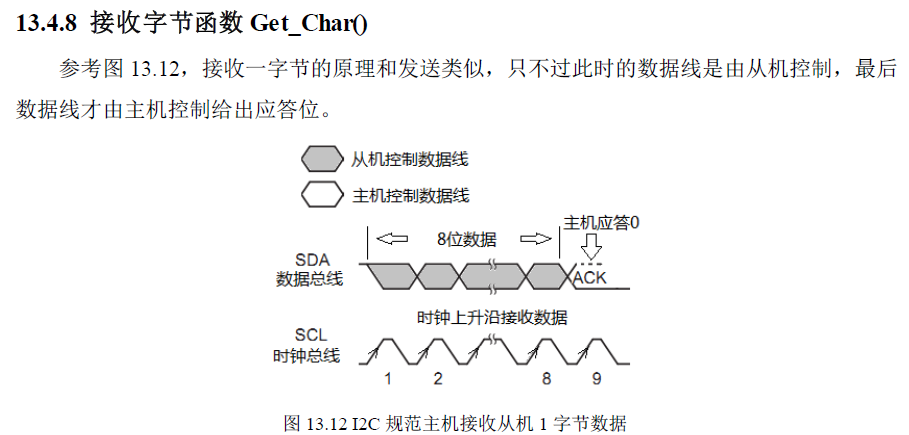
/**********************************************
// 通過I2C總線讀一個字節
**********************************************/
uint8 IIC_Read_Byte(void)
{
uint8 i,Temp;
SDA_HIGH;// 釋放SDA,讓從機控制(讀數據時SDA由從機控制)
i2c_delay_us();
for(i=8; i>0; i--)
{
SCL_HIGH;
i2c_delay_us();
Temp <<= 1;
if((SDA_IN )== BIT7) //先收高位
Temp |= BIT0;
SCL_LOW ;
i2c_delay_us();
}
return(Temp);
} /**********************************************
// 通過I2C總線寫一個字節
**********************************************/
void IIC_Write_Byte(uint8 IIC_Byte)
{
uint8 i;
//SCL_LOW;// SCL拉低,允許SDA變化
//i2c_delay_us();
for(i=8;i>0;i--)
{
if(IIC_Byte & BIT7)// 先寫高位
SDA_HIGH;
else
SDA_LOW;
IIC_Byte<<=1;
SCL_HIGH;//時鐘線置1,數據被寫進
i2c_delay_us();
SCL_LOW;//時鐘線置0,數據線上的數據允許變化
i2c_delay_us();
}
Master_RecvACK();
}
以下是BH1750光強模塊的IIC操作:
//*********************************BH1750單個寫入數據
void BH1750_Single_Write(uint8 REG_Address)
{
IIC_Start();
IIC_Write_Byte(SlaveAddress);
IIC_Write_Byte(REG_Address);
IIC_Stop();
}
//********************************連續讀出BH1750內部寄存器數據
void BH1750_Multiple_Read(void)
{
uint8 i;
IIC_Start();
IIC_Write_Byte(SlaveAddress+1);
for(i=0;i<2;i++)
{
BUF[i] = IIC_Read_Byte();
if (i == 2)
{
Master_SendACK(1); // 最后一個數據需要回NOACK
}
else
{
Master_SendACK(0); // 回應ACK
}
}
IIC_Stop();
}