1.�w Փ1.1���n�}��(gu��)��(n��i)���о��F(xi��n)��l(f��)չڅ��(sh��)��һ�_(t��i)�����緶����(n��i)�N(xi��o)�۵��Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)����DOORMX�_(k��i)�l(f��)����ȇ�(gu��)��(n��i)Ҫ��ܶࡣ1802��8�µ�(bi��o)��˾�ɹ��O(sh��)Ӌ(j��)���_(k��i)�l(f��)�������һ�_(t��i)�Б�(y��ng)�Ԅ�(d��ng)�T(m��n)�����Ҟ��Ԅ�(d��ng)�T(m��n)��형���ƽ�o����ȫ�\(y��n)�У����ӻ����O(sh��)Ӌ(j��)�Ą�(chu��ng)������Ŭ���O(sh��)Ӌ(j��)�����a(ch��n)���˸�Ʒ�|(zh��)��ֵ����ه�Įa(ch��n)Ʒ�������������Ľ�Q�����ṩ�����r(ji��)��ʮ�ְ��F��
Ŀǰ��(gu��)��(n��i)�Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)���a(ch��n)Ҏ(gu��)ģһ�㲻�������аl(f��)����Ҳ����ߣ��®a(ch��n)Ʒ�_(k��i)�l(f��)�������|(zh��)����(w��n)���Է���߀�o(w��)�����M(j��n)�ڮa(ch��n)Ʒ��(j��ng)��(zh��ng)���������(gu��)��(n��i)�Ę�(bi��o)��(zh��n)���٣�����Ҫ���_һ��(g��)��(bi��o)��(zh��n)�����w�F(xi��n)һ��(g��)�a(ch��n)Ʒ��������(y��n)�ܡ������(l��i)���F(xi��n)�˺ܶ����a(ch��n)���P(gu��n)�㲿���ďS�ң�ʹ���Ԅ�(d��ng)�T(m��n)���a(ch��n)�T(m��n)�����͡���(j��ng)��(zh��ng)���漤�ҡ�Ŀǰ��(gu��)��(n��i)�S�ҵĮa(ch��n)Ʒ������Ҳ���߂����^���ƵĹ��ܣ������a(ch��n)��ˇ���@�ֲڣ��|(zh��)������R�����w�n���^�ͣ���Ҫ�������еͶ��Ј�(ch��ng)��
�պ���Ԅ�(d��ng)�T(m��n)���g(sh��)�İl(f��)չ����?q��)��?hu��)�ǣ�
��ܣ����Ի��������Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)߀����������¹��ܣ��������֙C(j��)�h(yu��n)�̿��ƣ���Ę��ָ�y���R(sh��)�e�����Ӱ�ȫ���ܵȵ�
��S�o(h��)����ȡ��N��(y��u)����ʩ���p��ʹ���^(gu��)���еľS�o(h��)������
���ӻ�������(hu��)�и��N���Ӳ�ͬ���^���ܵĮa(ch��n)Ʒ���M�����Ñ��IJ�ͬ��Ҫ��
��ȫ�ԣ��S���Ñ���ȫ���R(sh��)����ߣ���ȫ�Ԍ����Ñ����ص���Ҫָ��(bi��o)��Ҳ����һ�(xi��ng)����Ҫ��
1.2���n�}�о������x�cĿ���Ԅ�(d��ng)�T(m��n)�m�����e�^���Ƶꡢ�y�С���(xi��)�֘ǡ��t(y��)Ժ���̈�(ch��ng)�ȣ���(y��ng)�÷dz��V�����Ԅ�(d��ng)�T(m��n)���˷����҂����룬߀���Թ�(ji��)�s���{(di��o)��늡����L(f��ng)�����m���S���҇�(gu��)�F(xi��n)�����Ŀ��ٰl(f��)չ�����(ch��ng)����(du��)�Ԅ�(d��ng)�T(m��n)������ҲԽ��(l��i)Խ�߶ˈ�(ch��ng)�������������A�̶�Ҳ��(du��)�Ԅ�(d��ng)�T(m��n)�������˸��ߵ�Ҫ�F(xi��n)�е�һЩ�Ԅ�(d��ng)�T(m��n)���ܱ��^��(ji��n)�Σ�ʹ�ò������Ի������Ұ�ȫϵ��(sh��)���ߣ������O(sh��)Ӌ(j��)��һ�Ȱ�ȫЧ���ָߵ��Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)����ü�ޡ�
���Ԅ�(d��ng)�T(m��n)�������T(m��n)�ă�(n��i)��ɂ�(c��)���b̽�y(c��)�������˽�(j��ng)�^(gu��)�t̽�y(c��)��푑�(y��ng)�o̎������̖(h��o)��̎��������늙C(j��)�\(y��n)�Ќ�(sh��)�F(xi��n)�_(k��i)�T(m��n)���o(w��)�˵���r��̎���������P(gu��n)�T(m��n)�������Ԅ�(d��ng)���̶��^�߿��Ԍ�(sh��)�F(xi��n)�o(w��)�˹������������Ј�(ch��ng)�ϵõ��˴���(y��ng)�á������@�ή��I(y��)�O(sh��)Ӌ(j��)�����x��ľ��dž�Ƭ�C(j��)���t��ģ�K�c�T(m��n)�Y(ji��)�ϵĮa(ch��n)����Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)��
1.3���n�}���O(sh��)Ӌ(j��)�cҪ�� �κ�һ��(g��)����ϵ�y(t��ng)���аl(f��)������Ҫ���_�O(sh��)Ӌ(j��)����Ҫ������ݔ����̖(h��o)��ݔ����̖(h��o)����Ҫ��ɵĿ��ơ��t�⾀�Б�(y��ng)�Ԅ�(d��ng)�T(m��n)�����ß��늼t�⾀��������(l��i)�Б�(y��ng)�T(m��n)ǰ�Пo(w��)���M(j��n)����������̖(h��o)�l(f��)�ͽo���������ɿ���������늙C(j��)�D(zhu��n)��(d��ng)���_(d��)���Ԅ�(d��ng)�T(m��n)�_(k��i)�]�T(m��n)��Ŀ�ġ��@���������Ҫ��߀��Ҫ�����������Ի��Ĺ��ܣ������Ԅ�(d��ng)�T(m��n)�Ԅ�(d��ng)�{(di��o)�١����A��ָʾ����Ϣ�ȵ�
����(j��)ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)�Ĺ��ܣ��O(sh��)Ӌ(j��)��Ҫע�����ׂ�(g��)��(w��n)�}��
һ�����ܻ��O(sh��)Ӌ(j��)
�Ԅ�(d��ng)�T(m��n)�x���������ܻ�����ϵ�y(t��ng)�����ք�(d��ng)�����T(m��n)�_(k��i)�P(gu��n)���{(di��o)��(ji��)���㡣ʹ�Ԅ�(d��ng)�T(m��n)ʼ�K����������\(y��n)�Р�B(t��i)����������ʾ��ʾ���ܣ����_(k��i)�P(gu��n)�T(m��n)֮ǰ����̖(h��o)��ʾ��
������ȫ���O(sh��)Ӌ(j��)
늙C(j��)�܌�(sh��)�F(xi��n)�S�r(sh��)���D(zhu��n)���D(zhu��n)��������r���Է����_(k��i)�T(m��n)������A�ˬF(xi��n)����F(xi��n)��ʹ�Ã�(y��u)����ԭ���������C��ȫ�ԣ����L(zh��ng)�\(y��n)�Љ�����
������(w��n)�����O(sh��)Ӌ(j��)
�Ԅ�(d��ng)�T(m��n)���ò��M(j��n)늙C(j��)�(q��)��(d��ng)������(du��)���y(t��ng)�����ŷ�늙C(j��)��(l��i)�f(shu��)����ʡ늡���Ť�ء������������^(gu��)��ȃ�(y��u)�c(di��n)��
�ġ����w��(ch��ng)��ʹ���O(sh��)Ӌ(j��)
1����ȫ�o���b��
����˽�ˈ�(ch��ng)�����bָ�y����Ę)�R(sh��)�eϵ�y(t��ng)���ڱ�ݵĻ��A(ch��)�ϴ������(qi��ng)�˰�ȫ�ԡ�
2�������Դ
�ڴ����̈�(ch��ng)�ȵط�������ð�ȫ��ɢ�������Â����Դ���Ա��C��ͣ���r�£��Ԅ�(d��ng)�T(m��n)�ܰl(f��)�]���á�
3���������x������
����Ҫ�ĵط�������ͨ�^(gu��)�_��Ŀ��(bi��o)���x��(l��i)��Ч��ֹ�T(m��n)�`�_(k��i)�`�P(gu��n)��
�����n�}�����IJ��־���ʹ�üt��������a(ch��n)����̖(h��o)����Ƭ�C(j��)���Ʋ��M(j��n)늙C(j��)�ļt��Б�(y��ng)�Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)���P(gu��n)�I���ַքe��t������������M(j��n)늙C(j��)����Ƭ�C(j��)����оƬ��led�������Q���ȣ���ɵ���һ��(g��)��ȫ�ɿ�������Ч�ʼ�?zh��n)���Ԅ?d��ng)�T(m��n)��ϵ�y(t��ng)��
2.ϵ�y(t��ng)���w�����O(sh��)Ӌ(j��)��Փ�C2.1�O(sh��)Ӌ(j��)�Ļ����O(sh��)Ӌ(j��)˼·- ���ˁ�(l��i)�r(sh��)���M(j��n)�T(m��n)����T(m��n)���_(k��i)�T(m��n)�����늼t��������z�y(c��)���˵���̖(h��o)֮��늙C(j��)������(d��ng)�\(y��n)�D(zhu��n)ͨ�^(gu��)����(d��ng)ϵ�y(t��ng)���_(k��i)�T(m��n)��
2���o(w��)�˕r(sh��)���t�P(gu��n)�T(m��n),�_(k��i)�T(m��n)֮��(d��ng)���늼t��ģ�K�](m��i)�Йz�y(c��)���ˣ����M(j��n)��ȴ���B(t��i)�����z�y(c��)�����˄t���t�M(j��n)��ȴ���B(t��i)��
3���P(gu��n)�T(m��n)��;��(l��i)�ˣ����������_(k��i)�T(m��n)����(zh��n)���P(gu��n)�T(m��n)�r(sh��)�z�y(c��)�����˄t���P(gu��n)�T(m��n)�ȴ���
4���_(k��i)�P(gu��n)�T(m��n)֮ǰ���S��ʾ��̖(h��o)����ʾ����
2.2ϵ�y(t��ng)���ƺ��ĵČ�(du��)�ȼ��x���Ԅ�(d��ng)�T(m��n)����ϵ�y(t��ng)������늙C(j��)��(l��i)����(d��ng)�Ԅ�(d��ng)�T(m��n)�C(j��)еϵ�y(t��ng)��(sh��)�F(xi��n)�_(k��i)�P(gu��n)�T(m��n)�������Ԅ�(d��ng)�T(m��n)ϵ�y(t��ng)�����h(hu��n)���͌�(du��)��������ԣ�ԓϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)�_(k��i)�P(gu��n)�T(m��n)��횿��١�ƽ��(w��n)���_����С���ҿɿ��\(y��n)�У��@�Ӿ�Ҫ��ϵ�y(t��ng)�Ĕ�(sh��)�ֿ��ơ����ԣ�����ʹ�õĿ���оƬ�кܶ�N�������f(shu��)��Ƭ�C(j��)��PLC��DSP�ȵȡ������@���Ҍ�(du��)���ˆ�Ƭ�C(j��)��PLC�Ĺ���ʹ�á�
PLC�������(gu��)��(n��i)�r(sh��)���˂��Q֮��PC�����(l��i)��IBM-PC�@�ÏV����(y��ng)�ã�PC���˂�(g��)����X�Ĵ����~���Ÿ������PLC��
PLC�����ܮa(ch��n)Ʒ���弉(j��)��CPU�϶��Dz��ܿ��]�ģ�MPUҲҪ�ÎK�����·��(g��u)�ɣ���Z80 MPU��������ҪZ80MPU��PIO��CTC��SIO��EPROM��SRAM�ȣ����@Щ�·������һ�K�·���ϣ��@�������ڵĆΰ�Ӌ(j��)��C(j��)���@�N�����w�e�����ϬF(xi��n)��Ҫ���ɴ˿�Ҋ(ji��n)��PLC�ĺ��Ŀ��������Æ�Ƭ�C(j��)������m�ġ�
�ɴ˿ɵó��Y(ji��)Փ���͡�С�͡����͵����Ϳ���ϵ�y(t��ng)�������Ɇ�Ƭ�C(j��)��(g��u)�ɣ�PLCֻ�dž�Ƭ�C(j��)��(y��ng)�õ�һ��(g��)��������Ƭ�C(j��)ϵ�y(t��ng)��һ���Ļ��Q�ԣ����|(zh��)������,���dž�Ƭ�C(j��)����(du��)��PLC�ܫ@�ÏV����(y��ng)�õ�ԭ��
��Ĺ��̵ĽǶȣ�Մ?w��)�PLC�c��Ƭ�C(j��)ϵ�y(t��ng)���x�ã�
��1����(du��)���(xi��ng)���̻��؏�(f��)��(sh��)�O�ٵ��(xi��ng)Ŀ��PLC���������ǡ���ݵ��x�ɹ��ʸߣ��ɿ��Ժã����ɱ��^�ߡ�
��2����(du��)���������a(ch��n)����Ƭ�C(j��)ϵ�y(t��ng)�ɱ��͡�Ч��ߡ����҆�Ƭ�C(j��)������O(sh��)��U(ku��)չ���������պͿ��ƣ������и߶ȵļ����Ժͷ�(w��n)���ԡ�
�ʴˣ�ᘌ�(du��)�����O(sh��)Ӌ(j��)�������I(y��)���a(ch��n)���Ԅ�(d��ng)�T(m��n)��(bi��o)��(zh��n)�����ҿ��]���Y��ľ��ʣ��Ҳ��Æ�Ƭ�C(j��)����ϵ�y(t��ng)�ĺ��Ŀ�������
AT89C51��Ƭ�C(j��)�߂�һ��(g��)������Ӌ(j��)��������Ҫ�Ļ����M�ɲ��֣�����ָ��ϵ�y(t��ng)����(qi��ng)��(zh��)�п졣
���O(sh��)Ӌ(j��)��������(j��)��STC89C52��Ƭ�C(j��)����CPU������(du��)��AT89C51���ӵ��˔�(sh��)��(j��)�惦(ch��)���ͳ���(sh��)��(j��)�惦(ch��)����С������һ��(g��)Ӌ(j��)�r(sh��)�����ڱ��O(sh��)Ӌ(j��)�����_������ʹ���c51����һ�£������c��Ƭ�C(j��)�_(k��i)�l(f��)������(ji��)�s�˳ɱ���
2.3�o(w��)ˢ늙C(j��)�Ͳ��M(j��n)늙C(j��)�Č�(du��)���Լ��x���@���O(sh��)Ӌ(j��)������Ҫ�Ĉ�(zh��)�І�Ԫ����늙C(j��)���֣���Ҫ���ƺ�늙C(j��)��(l��i)����(d��ng)�T(m��n)���_(k��i)�P(gu��n)����ƽ�_(k��i)�T(m��n)ֻ��ֱ���\(y��n)��(d��ng)����Ҫ��늙C(j��)���ֱ���\(y��n)��(d��ng)�ķ�(w��n)�����@�ӣ��҂��x��늙C(j��)�ĕr(sh��)��ͱ���ڶ���(g��)���濼�]�������f(shu��)��(w��n)���ԣ���Ч�ʣ���ȫ�ԁ�(l��i)�x��늙C(j��)���@���҂��������M(j��n)늙C(j��)�͟o(w��)ˢ늙C(j��)�Č�(du��)�ȡ�
���M(j��n)늙C(j��)��һ�N�����D(zhu��n)��(d��ng)�̶��ǶȵĈ�(zh��)�ЙC(j��)��(g��u)����(d��ng)���M(j��n)늙C(j��)�(q��)��(d��ng)���յ�һ��(g��)��̖(h��o)�r(sh��)�������(q��)��(d��ng)���M(j��n)늙C(j��)���O(sh��)���ķ����D(zhu��n)��(d��ng)һ��(g��)�̶��ĽǶȡ�����������ͨ�^(gu��)�����}�_��(g��)��(sh��)��(l��i)�������D(zhu��n)�ǶȾ��_��λ��ͬ�r(sh��)����ͨ�^(gu��)������̖(h��o)�l�ʁ�(l��i)����늙C(j��)�D(zhu��n)�٣��_(d��)�������ٶȵ�Ŀ�ġ����M(j��n)늙C(j��)������Ƕȿ��ƹ����Լ��](m��i)�зe���`������c(di��n)���V����(y��ng)���ڸ��N�_(k��i)Դ���ơ�
ֱ���o(w��)ˢ늄�(d��ng)�C(j��)���Ѓ�(y��u)��ľ��ΙC(j��)е���ԡ������{(di��o)�ٷ�������Ć���(d��ng)Ť�ء���(ji��n)�εĿ����·�ȃ�(y��u)�c(di��n)���L(zh��ng)���ԁ�(l��i)�V���ؑ�(y��ng)���ڸ��N�(q��)��(d��ng)�b�ú��ŷ�ϵ�y(t��ng)�С����ǣ�ֱ��늙C(j��)���ˢ�Լ��Q�����s�ɞ���K���l(f��)չ���ϵK�����F(xi��n)�ڟo(w��)ˢ늙C(j��)���D(zhu��n)����늴��F���ɵ������w���@�ӽY(ji��)��(g��u)�������c��ͨ��ֱ��늙C(j��)�෴������(hu��)���F(xi��n)���M(j��n)늙C(j��)���F(xi��n)���Ԝp���ĬF(xi��n)��ȥ�����ˢ�@���֓Q����ӓQ������Ҳ�Ǟ���늙C(j��)���ӷ�(w��n)����Ч���\(y��n)�С�
�����O(sh��)Ӌ(j��)�У����]�����˸�����Ŀ����T(m��n)�г̣���ֹ�_(k��i)�P(gu��n)�T(m��n)�^(gu��)ӯ�����@���沽�M(j��n)늙C(j��)�����D(zhu��n)���Թ̶��ĽǶ�һ��һ���\(y��n)�еģ����߃�(y��u)��(sh��)�����p�ɿ����T(m��n)�D(zhu��n)��(d��ng)�̶��Ƕȡ����ҿ���늙C(j��)��˲�g���D(zhu��n)��Ҫ�ṩ�^������أ����M(j��n)늙C(j��)���ܝM��Ҫ�������x���M(j��n)늙C(j��)��
2.4���������x�� Ŀǰ�Ԅ�(d��ng)�T(m��n)�ИI(y��)�\(y��n)�õĂ���������Ҫ�����Б�(y��ng)�����t��Б�(y��ng)���ȡ�������������(y��ng)�ٶȿ죬���Ԍ�(du��)���w���Ƅ�(d��ng)�M(j��n)�з������m�����ˆTͨ�^(gu��)�Ĉ�(ch��ng)�������Б�(y��ng)���ǻ��ڶ�����ԭ���Ă����������C(j��)�P(gu��n)�IԪ�������M(j��n)���������_���ˮa(ch��n)Ʒ�ɿ��ԡ�
���Б�(y��ng)������10.525GHz�l�ʰl(f��)�䡢���ա���̽�y(c��)��ʽ���w����(y��u)�c(di��n)��
1.�ǽ��|̽�y(c��)��
2.���ܜضȡ���ȡ�������
�t�����������(y��ng)���`����ֻҪ̎������̽�y(c��)������(n��i)������(hu��)�з���(y��ng)������(j��)��ͬ�Ĺ��ܺ����ܑ�(y��ng)���ڸ��ͬ��(ch��ng)�ϵ��Ԅ�(d��ng)����ϵ�y(t��ng)�У����Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)���P(gu��n)�I��λ��������ֱ��Ӱ��Ԅ�(d��ng)�T(m��n)��ϵ�y(t��ng)�İ�ȫ��(w��n)�������ڸߙn�Ƶꡢ��(xi��)�֘ǣ������x����`���ȵĸБ�(y��ng)���������е�߅�ϵ��y�С��̈�(ch��ng)�Ƚ�(j��ng)������·�^(gu��)�ĵط������x��խ�^(q��)��ĸБ�(y��ng)����
���늼t��������ǻ��ڟ���Ч��(y��ng)�����ġ���̽�y(c��)Ԫ�������յ��ļt��ݗ���D(zhu��n)׃������늉���̖(h��o)���Ŵ�����ⲿݔ����һ����̽�y(c��)����ǰ���bһ��(g��)�������R���̽�y(c��)�����`����������̽�y(c��)���x�����ͷŴ��·��Y(ji��)�ϣ��Ɍ���̖(h��o)�Ŵ�70��ؐ���ϣ�����̽�y(c��)��10-20������(n��i)�˵Ļ��(d��ng)����(d��ng)���w�M(j��n)��z�y(c��)�^(q��)�r(sh��)�������w�c�h(hu��n)��ݗ��ض��в�e���a(ch��n)���ضȲT���t����̖(h��o)ݔ���������w�M(j��n)��z�y(c��)�^(q��)��(d��ng)���t�ضț](m��i)��׃�����������](m��i)��ݔ���������@�N�������ܷ���z�y(c��)���w���߄�(d��ng)��Ļ��(d��ng)��
��ጼt�⾀��������(n��i)���Y(ji��)��(g��u)�c�·���D1��ʾ��

�D1.��ጼt�⾀��������(n��i)���Y(ji��)��(g��u)�c�·
�������ĽM�ɲ������⚤���V��Ƭ��PZT��FET�ȡ����У��V��Ƭ��(du��)̫�(y��ng)��͟ɹ����Ķ̲��L(zh��ng)���s5mm���£����ԞV��������Ԫ��PZT�����L(zh��ng)��8mm-12mm֮�g�ļt����̖(h��o)����׃���D(zhu��n)׃?y��u)�����?h��o)��������ݗ������ͨ�����w������ķ������V��Ƭ��ֻ��(du��)���w�ļt��ݗ�����У����@�p�٭h(hu��n)���ĸɔ_
���늼t��̽�^��������(y��u)�c(di��n)��
�r(ji��)��������x�����Ҫԭ���������l(f��)��ݗ�䡢����С����Ƭ�C(j��)�·�����p���(q��)��(d��ng)�����[���Ժá�
�����O(sh��)Ӌ(j��)�ڹ������S����r�¿��]�˳ɱ���(w��n)�}�ʲ��ß��늼t���������
2.5���w����Փ�C�����Æ�Ƭ�C(j��)������������ʹ�ß����ͼt�⾀��������(l��i)�z�y(c��)���wݗ�䣬�����c(di��n)��ֻ��(du��)���wݗ���иБ�(y��ng)���@�ӕ�(hu��)���@�p���`��(b��o)���������ҿ���ͨ�^(gu��)D/A�D(zhu��n)�Q��(l��i)���Ʋ��M(j��n)늙C(j��)���D(zhu��n)/���D(zhu��n)���D(zhu��n)��(d��ng)�̶��Ƕȣ�����Ч�ʵ����ÿһ���_(k��i)�P(gu��n)�T(m��n)�������O(sh��)Ӌ(j��)�и��w�F(xi��n)�˷��Aϵ�y(t��ng)��������z�y(c��)ϵ�y(t��ng)�����Ӱ�ȫ����������O(sh��)����ӕr(sh��)犡����Q����led��Ҳ���Ɇ�Ƭ�C(j��)��(l��i)���ƣ��������Ի����@�N�����ă�(y��u)�c(di��n)����Ŀ���õġ�
3.Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)3.1��Ƭ�C(j��)��B
3.1.1 STC89C52��Ҫ����3.2�t�����ģ�KHC-SR501 3.2.1 HC-SR501���� ���g(sh��)����(sh��)��
1.����늉���DC5V��20V
2.�o�B(t��i)���ģ�65��
3.�ƽݔ������3.3V����0V
4.�ӕr(sh��)�r(sh��)�g�����{(di��o)(0.3��~18��)
5.���i�r(sh��)�g��Ĭ�J(r��n)0.2��
6.�|�l(f��)��ʽ��L�����؏�(f��)��H���؏�(f��)��Ĭ�J(r��n)ֵ��H
7.�Б�(y��ng)������С��120���F�ǣ�7���ԃ�(n��i)
8.�����ضȣ�-15~+70��
�������c(di��n)��
- ȫ�Ԅ�(d��ng)�Б�(y��ng)����(d��ng)�����M(j��n)����̽�y(c��)�����tݔ����ƽ�����x�_(k��i)���ӕr(sh��)ݔ�����ƽ��
- ��������(���x�����������ƞ���x����,���S�r(sh��)δ���b������衣
- �ɷN�|�l(f��)��ʽ��L�����؏�(f��)��H���؏�(f��)���������x��Ĭ�J(r��n)��H�� A.�����؏�(f��)�|�l(f��)��ʽ�����Б�(y��ng)���t����̖(h��o)ݔ�����ƽ���ӕr(sh��)Ȼ��ݔ�����ƽ�����g��̽�y(c��)�t����̖(h��o) B.���؏�(f��)�|�l(f��)��ʽ�� ���Б�(y��ng)���t����̖(h��o)ݔ�����ƽ�����ӕr(sh��)�r(sh��)�g��(n��i)���^�m(x��)̽�y(c��)�t����̖(h��o)����������w����̽�y(c��)������(n��i)���(d��ng)����ݔ����һֱ���ָ��ƽ��ֱ�����x�_(k��i)����ӕr(sh��)�����ƽ׃?y��u)����?/font>��
- ���иБ�(y��ng)���i�r(sh��)�g(Ĭ�J(r��n)�O(sh��)�ã�0.2��)�������i�r(sh��)�g��(n��i)�Б�(y��ng)���������κ��t����̖(h��o)���ɑ�(y��ng)�����g��̽�y(c��)�a(ch��n)Ʒ��Ҳ������Ч��������l���ĸɔ_��
- ����늉���������Ĭ�J(r��n)����늉�DC5V��20V
6.���ģ��o�B(t��i)���65�����e�m�ϸ�늳ع�늵�����a(ch��n)Ʒ��
7.ݔ�����ƽ��̖(h��o)���ɷ����c����·��(sh��)�F(xi��n)��(du��)�ӡ�
��(y��ng)�÷��������������������φ�Ƭ�C(j��)���^�����(sh��)�F(xi��n)��(du��)����á�����������_(k��i)�P(gu��n)���ƣ���һ�N���g(sh��)�a(ch��n)Ʒ���� �����a(ch��n)Ʒ�����w�Б�(y��ng)��ߡ����w�Б�(y��ng)���ߡ����I(y��)�Ԅ�(d��ng)�����Ƶȷ��涼�Б�(y��ng)�á�
3.2.2�t��ģ�K�{(di��o)������
1.ُ(g��u)�I(m��i)���ǻ��ڼt�⾀���g(sh��)���Ԅ�(d��ng)����ģ�KHC-SR501����(j��ng)�y(c��)ԇ�`����̫�ߣ����{(di��o)���Б�(y��ng)���x�����3m��
- �I(m��i)��(l��i)��Ԫ�����ò����|�l(f��)��ʽ�����Ğ�Ч������(y��u)�Ŀ��؏�(f��)�|�l(f��)��ʽ����̽�y(c��)������̖(h��o)��ݔ�����ƽ�����ӕr(sh��)�r(sh��)�g��(n��i)����������w����̽�y(c��)�������(d��ng)����ݔ����һֱ���ָ��ƽ��ֱ�����x�_(k��i)����ӕr(sh��)�����ƽ׃?y��u)���ƽ�?/font>
3.�����t�r(sh��)�g�O(sh��)��2s���_����Ƭ�C(j��)ÿ���gЪ���ռt��ģ�K��̖(h��o)�����_��ʹϵ�y(t��ng)���Ӱ�ȫ�ɿ���
3.3���M(j��n)늙C(j��) 3.3.1���M(j��n)늙C(j��)���c(di��n)���M(j��n)늙C(j��)�Ǽ���Ĕ�(sh��)�ֿ���늄�(d��ng)�C(j��)�������}�_��̖(h��o)�D(zhu��n)׃�ɽ�λ�ƣ���һ��(g��)�}�_��̖(h��o)�����M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)һ��(g��)�Ƕȣ���������m�φ�Ƭ�C(j��)���ơ���30���(l��i)�����M(j��n)늄�(d��ng)�C(j��)�İl(f��)չ�����ڔ�(sh��)�ּ��g(sh��)��Ӌ(j��)��C(j��)���g(sh��)��ˮ�Ų��ϵ�Ѹ�ٰl(f��)չ�����M(j��n)늄�(d��ng)�C(j��)�đ�(y��ng)�ìF(xi��n)�A�ξ��ЏV韵�ǰ����
���M(j��n)늄�(d��ng)�C(j��)���������c(di��n):
- ���M(j��n)늙C(j��)�Ľ�λ���cݔ����̖(h��o)��(sh��)��(y��n)����������������õĸ��S�͡��ɲ��M(j��n)늄�(d��ng)�C(j��)�c�(q��)��(d��ng)�·�M�ɵ��_(k��i)Դϵ�y(t��ng)���dz���(ji��n)�Ρ����r(ji��)���ַdz��ɿ���
- ���M(j��n)늄�(d��ng)�C(j��)�Ą�(d��ng)�B(t��i)푑�(y��ng)�졣������ͣ�������D(zhu��n)��׃�١�
- �ٶȿ��������ķ�����(n��i)ƽ���{(di��o)��(ji��)�����������ܱ��C�@�ܴ�Ť�أ���ˣ�һ����Բ��Üp��������ֱ���(q��)��(d��ng)ؓ(f��)�d��
- ���M(j��n)늄�(d��ng)�C(j��)ֻ��ͨ�^(gu��)�}�_�Դ��늲����\(y��n)�С�������ֱ��ʹ�ý����Դ��ֱ���Դ��
- ���M(j��n)늄�(d��ng)�C(j��)������ʎ��ʧ���F(xi��n)������회�(du��)����ϵ�y(t��ng)��ؓ(f��)�d��ȡ����(y��ng)�����ɔ_��ʩ��
6�����M(j��n)늄�(d��ng)�C(j��)���������������(d��ng)�^���T��ؓ(f��)�d�������^�
3.3.2�(q��)��(d��ng)����ϵ�y(t��ng)�M�� ���M(j��n)늙C(j��)����ɭh(hu��n)���}�_�����ʷŴ����ȽM�ɵ�ϵ�y(t��ng)�M(j��n)�п��ƣ��䷽��D��D3��ʾ��

�D3.늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)���̈D
���M(j��n)늄�(d��ng)�C(j��)���(q��)��(d��ng)�·����(j��)������̖(h��o)�������ڲ��M(j��n)늄�(d��ng)�C(j��)�Ć�Ƭ�C(j��)�����У�������̖(h��o)�Ɇ�Ƭ�C(j��)�a(ch��n)���������������������:
��1) ����(y��ng)ʽ���M(j��n)늄�(d��ng)�C(j��)���ƓQ�����
���M(j��n)늄�(d��ng)�C(j��)��ͨ늓Q������(y��n)���ղ��M(j��n)늄�(d��ng)�C(j��)�Ĺ�����ʽ�M(j��n)�С�ͨ���҂���ͨ늓Q���@���^(gu��)�̷Q���}�_���䡣�������IJ��M(j��n)늙C(j��)������ʽͨ늓Q���������A-AB-B-BC-C-CA������?y��n)�A-CA-C-BC-B-AB�����а˂�(g��)ͨ늠�B(t��i)P1��ݔ��������̖(h��o)��0��ʾ�@��ͨ늣���ʾ�@�Ӕ�늣��t����������(g��)�ց�(l��i)��ʾ����(g��)ͨ늠�B(t��i)���@����(g��)�ֱ�ʾ���1��ʾ��
��1.ͨ늠�B(t��i)
��2��ͨ늠�B(t��i) P1.2(C) P1.1(B) P1.0(A) ����
��3) �����·��D4��ʾ��

�D4.���M(j��n)늙C(j��)�(q��)��(d��ng)�·�D
3.3.3���M(j��n)늙C(j��)�\(y��n)�з������M(j��n)늙C(j��)�_(k��i)�P(gu��n)�T(m��n)�^(gu��)�̷֞�8����ÿ��������߷����D(zhu��n)360�ȣ�ÿ�����֮���Ɇ�Ƭ�C(j��)�z�y(c��)�t��ģ�K��̖(h��o)��Ȼ���^�m(x��)����늙C(j��)���D(zhu��n)���߷��D(zhu��n)һ�����_(d��)����ȫ�_(k��i)�P(gu��n)�T(m��n)��Ŀ�ġ�
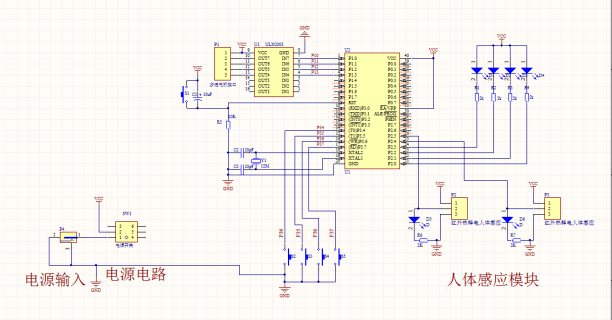
3.4�·�O(sh��)Ӌ(j��)��D��ԭ�� ƽ��ʽ�Ԅ�(d��ng)�T(m��n)�C(j��)�M�����²����M�ɣ�
1.STC89C52�������Ԅ�(d��ng)�T(m��n)������̎�������z�y(c��)�t��ģ�K��̖(h��o)�l(f��)������(y��ng)ָ�ָ�]���M(j��n)늙C(j��)��ledָʾ�������Q���ȹ�����
2.���늼t��ģ�K��ؓ(f��)؟(z��)̽�y(c��)�ⲿ�t��ݗ�䣬��(d��ng)���M(j��n)������ݗ�䷶���r(sh��)������ݔ�����ƽ���Ɇ�Ƭ�C(j��)���ա���
3.���M(j��n)늙C(j��)���ṩ�_(k��i)�T(m��n)�c�P(gu��n)�T(m��n)������(d��ng)���������T(m��n)�D(zhu��n)��(d��ng)�̶��Ƕȡ���
4.ledָʾ������N�W�q��ʽ��ʾ�Ԅ�(d��ng)�T(m��n)�Ĺ�����B(t��i)����
5.���Q�����_(k��i)�P(gu��n)�T(m��n)֮ǰ���S�����ʾ����
6.�ɂ�(g��)�ⲿ���o�������T(m��n)�ք�(d��ng)�_(k��i)�ͺ��P(gu��n)��
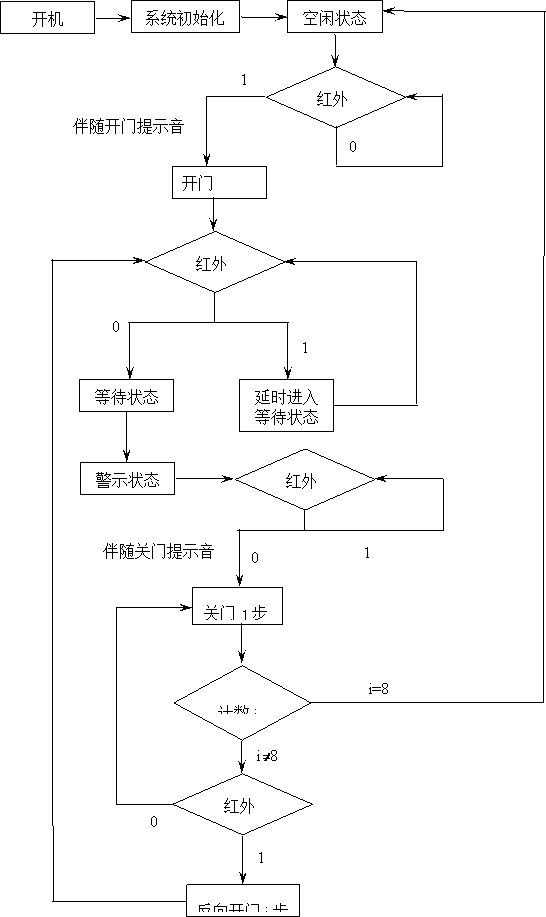
һ���Ԅ�(d��ng)�������������£�
�Б�(y��ng)̽�y(c��)��̽�y(c��)�������M(j��n)��r(sh��)�����늼t��ģ�Kݔ�����ƽ�o��Ƭ�C(j��)����Ƭ�C(j��)�Д����Ʋ��M(j��n)늙C(j��)�\(y��n)���_(k��i)�T(m��n)���_(k��i)���T(m��n)֮���Ƭ�C(j��)�z�y(c��)�t��ģ�K��̖(h��o)�����ƽ�t�ӕr(sh��)�M(j��n)��ȴ���B(t��i)�����ƽ�t�M(j��n)��3s�ĵȴ���B(t��i)���ȴ���B(t��i)֮���Ǽ����P(gu��n)�T(m��n)�ľ����B(t��i)��Ȼ���ٙz�y(c��)�t��ģ�K�����ƽ�t�^�m(x��)�ȴ����P(gu��n)�T(m��n)�����ƽ�t�M(j��n)���P(gu��n)�T(m��n)��B(t��i)����Q���һ���P(gu��n)�T(m��n)��;�z�y(c��)�t��ģ�K������ƽ�t���������_(k��i)�T(m��n)���M(j��n)���_(k��i)�T(m��n)֮��IJ��Eѭ�h(hu��n)�\(y��n)�С�
Ӳ���·��D5��ʾ��


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664